Traditionally, when it comes to high-tech self-assembling microscopic structures for use in medicine delivery, and refined, delicate grippers for robotics, there’s been a dearth of effective, economical options. While some options exist, they are rarely as effective as desired, with microscopic medicine delivery mechanisms, for example, not having the optimal porosity. Similarly, in so-called soft robotics, many compromises had to be made.
A promising technology here involves the manipulation of flat structures in a way that enables them to either auto-assemble into 3D structures, or to non-destructively transform into 3D structures with specific features such as grippers that might be useful in both micro- and macroscopic applications, including robotics.
Perhaps the most interesting part is how much of these technologies borrow from the Japanese art of origami, and the related kirigami.
Flat Is Better
Rather than trying to build three-dimensional structures, it is significantly more efficient if one can coax sheets of a material or even individual molecules to self-assemble into the desired shape. In the area of biomedical engineering, for example, there are strong use cases for everything from drug delivery mechanisms that can precisely and efficiently deliver certain drugs where they are needed, to microsopic surgical tools such as grippers that can be controlled using external triggers.
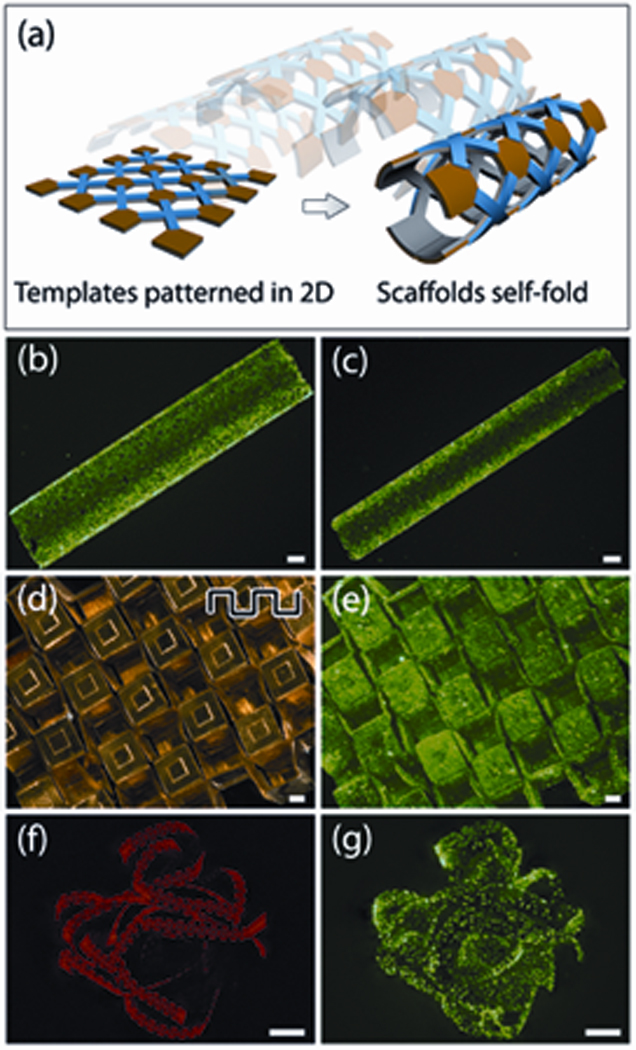
In a review paper by Randall et al. (2012), potential applications and the state of the art at the time were explored, focusing on the use of hinge-based, self-folding mechanisms. The exciting notion here is that it would allow us to create tiny mechanisms using two-dimensional lithography methods and similar common 2D manufacturing mechanisms.
As demonstrated in the image on the right, Randall et al. were able in previous research to produce 2D structures that when released from a substrate self-folded into a 3D structure using built-in hinges. This essentially makes these structures into a self-assembling type of origami by designing the positioning of the hinges.
They note that the use of lithography as commonly used in the semiconductor industry is not optimal for this type of assembly, due to a preference to use organic and other materials that are not commonly encountered in semiconductor lithography. The use of soft lithography methods that shape biopolymers and similar into the requisite shape were thought to be promising.
Self-Assembling Machines
In an article by Felton et al. (2014) (PDF), a similar method to Randall et al is used, except on a much larger scale with self-assembling robots. The essential idea here is to use the concept of computational origami to create what is essentially a flat circuit board with embedded electronics. Upon activation, shape-memory composites along embedded hinges are activated
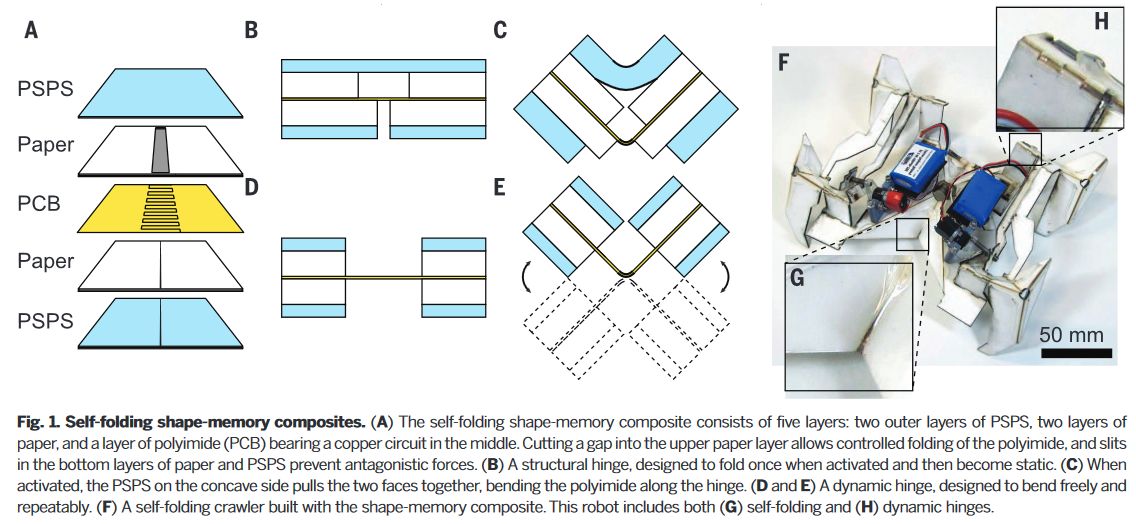
Their demonstrated robot uses a sandwich of layers of pre-stretched polystyrene (PSPS), paper and a PCB. The PSPS is a shape-memory polymer that when heated to approximately 100°C contracts. When the joint has completed its rotation, the heat source is removed and as the PSPS hardens, the new orientation is permanent until heated again.
Of the five steps required to fold the robot from a flat shape into the final, 3D shape, three are self-folding, with motors handling the remaining two steps. After connecting a power source to the flat assembly, it takes approximately four minutes for the folding steps to complete and the joints to cool down. After folding, the robot can then proceed to walk around in its new, three-dimensional configuration.
Not all of their robots folded successfully, however: as they note in the paper, they needed three attempts to get a successful self-assembly. Apparently precision with the hinges to get them into the desired orientation is an issue there. Even so, considering the low cost of the materials, one could imagine flat, self-assembling robots like these being mass-produced.
As noted, this technique could be rather useful for rapid prototyping, and to make it easy for everything from robots to satellites to self-assemble once their intended location has been reached. The temperature for their heat-sensitive polymer of 100°C is a quality of the selected material, and depending on the intended environmental operating conditions, different materials could be picked to adapt to a different temperature range.
A Delicate Touch
The aforementioned studies involved what are essentially types of high-tech origami, as their 3D shape derived from their 2D surface using nothing but a number of folds. This is distinct from kirigami (切り紙), as is made clear by the name: 切り (kiri) meaning ‘to cut’ and 紙 (kami) meaning ‘paper’. Instead of the folding of the paper creating the final shape, with kirigami it are the initial cuts made in the paper which determine the 3D shape that it will assume.
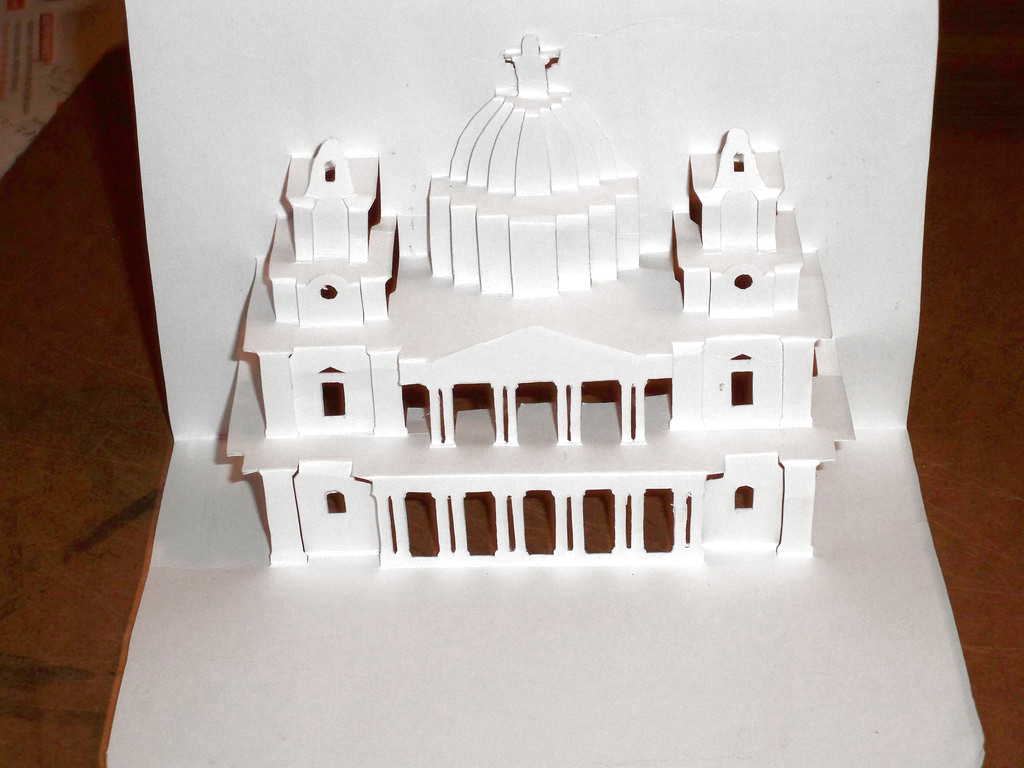
A well-known Western example of kirigami can be found in so-called pop-up books, where opening a page will result in a variety of shapes forming from the flat paper due to the way the paper was cut, occasionally helped by a guiding fold. Depending on the level of sophistication the most delicate shapes can be created in this manner.
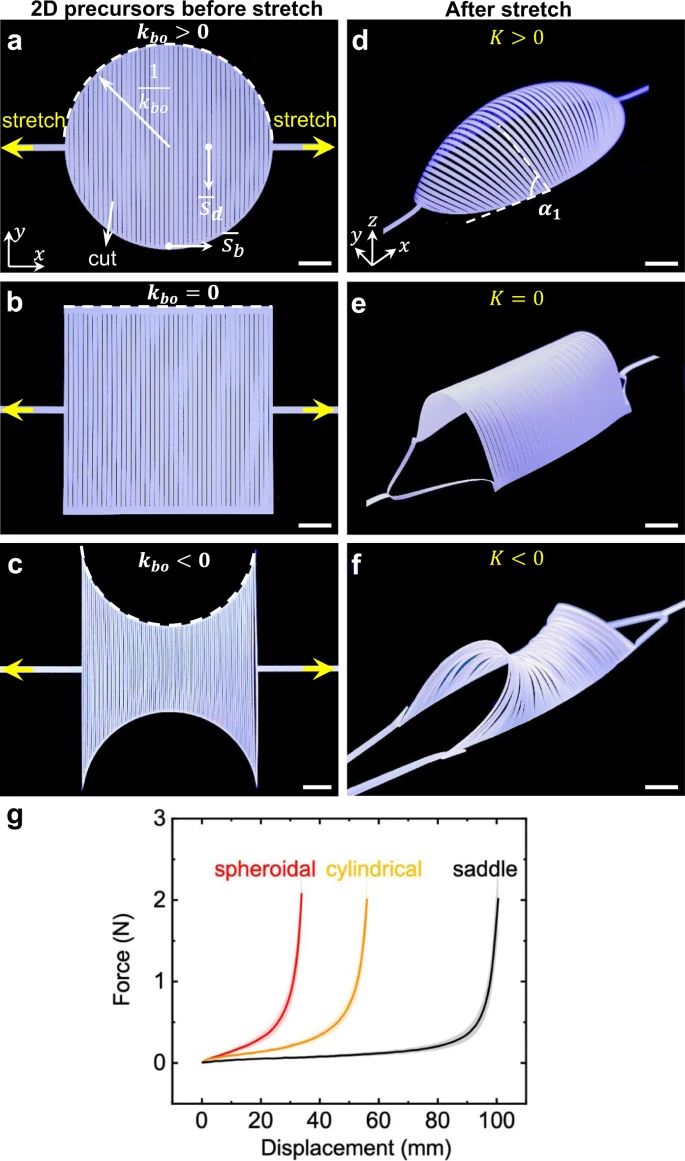
This was also the guiding principle behind a recent study by Hong et al. (2022) in Nature Communications, with an attempt to create a type of computational kirigami that would allow for three-dimensional shapes to be translated to a series of cuts in a flat surface. A simple example of this is demonstrated in the article with three basic shapes:
At the core of their approach to computational kirigami is the Gauss-Bonnett theorem. Within the field of differential geometry this covers the relationship between surfaces, connecting its geometric curvature with its Euler characteristic (topological curvature). This applies to e.g. the geodesic curvature of Earth and its Gaussian curvature. Effectively this provides a mathematical way to describe the transformations as they move from the different representations
Using finite element method (FEM) simulation and analytical modeling the morphology changes were compared with the theoretical model, establishing the correlation between the boundary curvature of the 2D kirigami sheet and the Gaussian curvature of the 3D shape.
Using the thus developed model, Hong et al. moved to create a soft gripper that could exert precisely defined forces, allowing for delicate objects to be picked up and released again without damage.

This structure consists out of essentially two flaps alongside a central region, on which an external (pulling) force is exerted. Due to the precisely calculated slits in the structure, the force exerted causes a non-permanent deformation of the thus created gripper. Because of the large amount of control, this simple structure can then be used to grip, hold and gently release anything from raw egg yolk to a live fish. It also has enough force to pick up and hold onto a human hair, as demonstrated in the embedded video:
Thinking Outside The Box
Possibly the most intriguing aspect of the preceding studies is how much of it can already be applied today. Rather than taking the obvious path of focusing on finding ways to directly construct complex, three-dimensional structures – whether on a macro- or microscopic scale – we can instead make the box assemble itself.
Although it is hard to say at this point how much of this research will find real-life uses, and what will run in other hurdles along the way, there does appear to be a lot of promise in these 2D-transformation-focused approaches. Much like with general research into self-assembling nanostructures, there does appear to be a trend towards engineering systems which can handle the assembly themselves.
While medical applications of self-folding, surgical nanobots are probably still a while off, that doesn’t mean that we can’t already make self-assembling, flatpack-style robots, along with gentle robotic grippers and wherever else our imagination and mathematics take us.













Great article!
DG is one of my favorite fields of math and this is really a very hands-on application of it.
I enjoyed it as well, I just know too little about the subject to comment it.
It’s applications could be maybe helpful in microsurgery? Either way lifting the small fish without hurting it was great!
Is there any free software or relatively inexpensive software that allows you to draw the shape of the flat paper you wish to start with and the folded shape you want to end up with?
I was inspired enough by a YouTube video I saw about Kirigami grippers to go make my own.
It took a bit of trial-and-error to get something usable, but I did and wrote up a short OpenSCAD script to generate gripper pads that can be 3D-printed in flexible materials.
https://www.thingiverse.com/thing:5157512
I designed one also, after seeing this HaD post!
https://www.thingiverse.com/thing:5286213