If you have a fear of heights and find yourself falling out of an airplane, you probably don’t want to look up to find your parachute full of holes. However, if the designer took inspiration from kirigami in the same way researchers have, you may be in better shape than you would think. This is because properly designed kirigami can function as a simple and effective parachute.
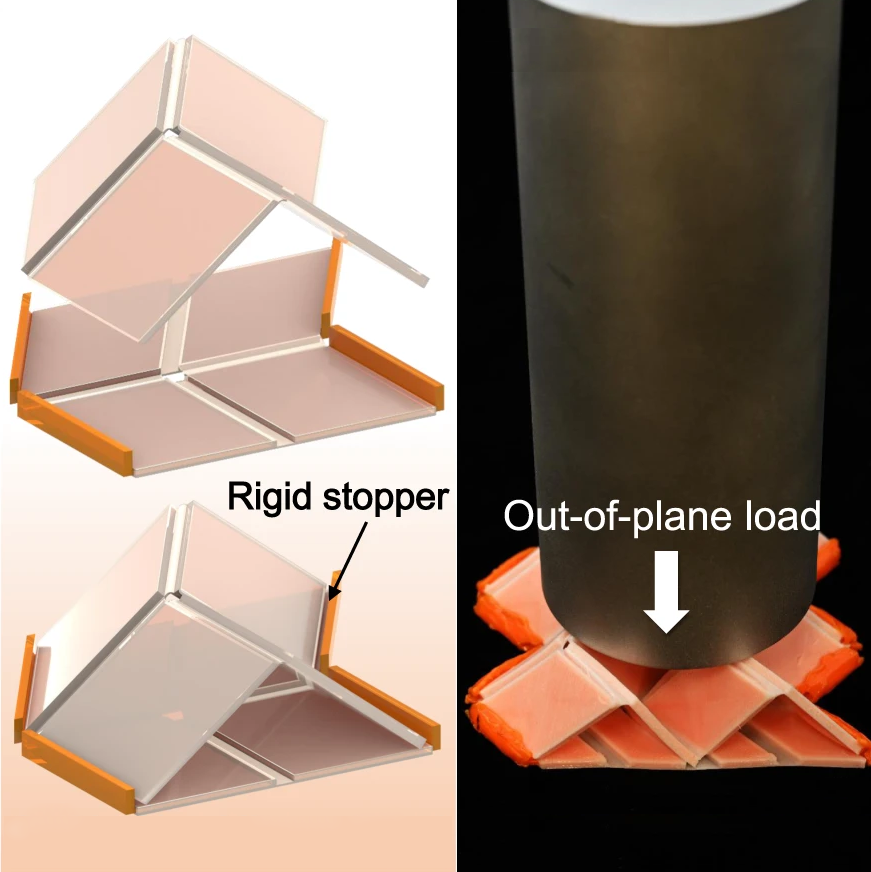
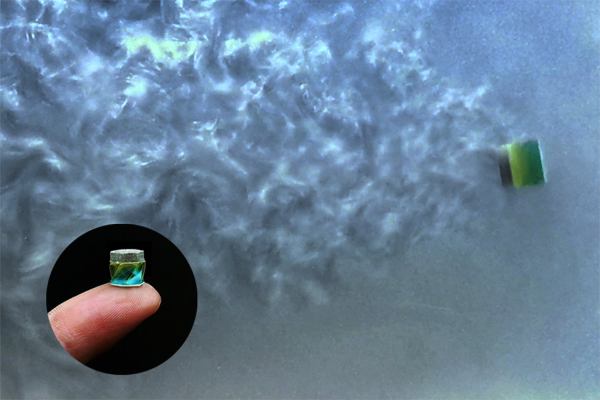
Kirigami, for those unfamiliar, is a cousin of origami where, instead of folding, you cut slits into paper. In this case, the paper effectively folds itself after being dropped, which allows the structure to create drag in ways similar to traditional parachute designs. Importantly, however, the stereotypical designs of parachutes have some more severe drawbacks than they appear. Some major issues include more obvious things, such as having to fold and unpack before and after dropping. What may be less obvious are the large eddies that traditional parachutes create or their ease at being disturbed by the surrounding wind.
The kirigami chutes fix these issues while being easier to manufacture and apply. While these are not likely to be quite as effective for human skydiving, more durable applications may benefit. Quoted applications, including drone delivery or disaster relief, worry more about accuracy and scalability rather than the fragile bones of its passenger.
Clever and simple designs are always fun to try to apply to your own projects, so if you want to have your own hand, make sure to check out the paper itself here. For those more interested in clever drone design to take inspiration from, look no further than this maple seed-inspired drone.
Continue reading “Holy Parachute Out Of Kirigami” →