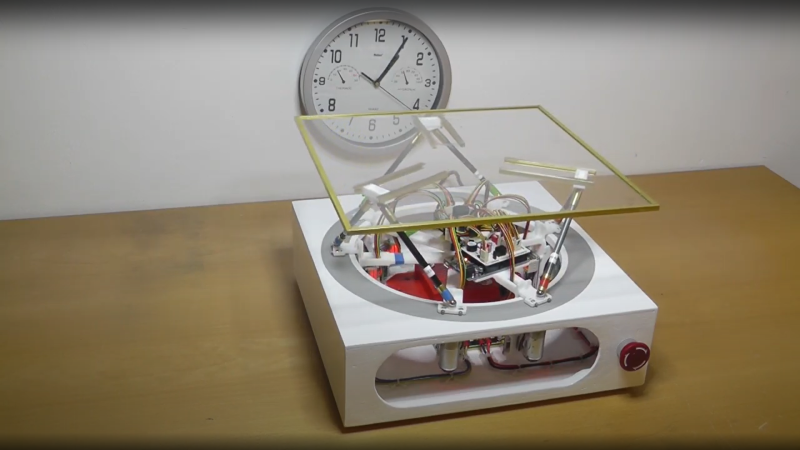
Stewart platforms are pretty neat, and not seen in the wild all that often, perhaps because there aren’t a vast number of hacker-friendly applications that need quite this many degrees of freedom within such a restricted movement range. Anyway, here’s an interesting implementation from the the curiously named [Circular-Base-Stewart-Platform] YouTube channel (no, we can’t find the designer’s actual name) with a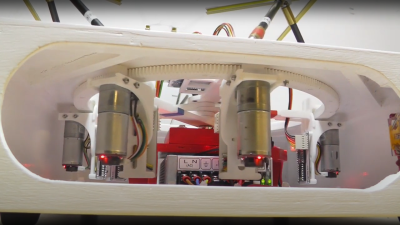 series of videos from a few years ago, showing the construction and operation of such a beast. This is a very neat mechanism comprised of six geared motors on the end of arms, engaging with a large internal gear. The common end of each arm rides on the central shaft, each with its own bearing. With the addition of the usual six linkages, twelve ball joints, and a few brackets, a complete platform is realised.
series of videos from a few years ago, showing the construction and operation of such a beast. This is a very neat mechanism comprised of six geared motors on the end of arms, engaging with a large internal gear. The common end of each arm rides on the central shaft, each with its own bearing. With the addition of the usual six linkages, twelve ball joints, and a few brackets, a complete platform is realised.
This circular arrangement is so simple that we can’t believe we haven’t come across it before. One interesting deviation from the usual Stewart platform arrangement is the use of a central slip-ring connector to provide power, allowing the whole assembly to rotate continuously, in addition to the usual six degrees of freedom the mechanism allows. Control is courtesy of an Arduino Pro Mini, which drives the motors using a handful of Pololu TB6612 (PDF) dual H-bridge driver modules. Obviously, the sketch running on the Arduino will give the thing a fixed motion, but add in an additional data link over that central slip-ring setup (or maybe a wireless link), and it will be much more useful.
We recently saw another 6-DOF actuator design, using flexures, yet another ball-balancing hack, but if you want an actually useful Stewart platform application, checkout this pool-playing robot!
Thanks [quibble_droid] for the tip!














WOW. That is amazing. One axis and all that motion.
Looks a lot like an upside down Delta 3D printer…
Yes, power over slip-ring and data over WiFi. Next, power over induction so no wires.
This is pretty neat. It looks like a great project with lots of possibilities.
Geez. Really kicking myself for not figuring this way to do Stewart platforms. Stuck on the linear-actuator model. Feeling kinda stupid now, because this is genius.
clever design.
That could be the basis of a new kind joystick. Replace the platform with a handle. Adjust the mechanical advantage so the handle could be easily moved. Finally, replace the the motors with some sort of rotary motion detectors (potentiometers, incremental encoders, etc.) to make sense of the handle’s movements.
I believe that’s the basis of the Novint Falcon.
replace the toothed driving gears with worms, and you’d have a platform with very low backdrivability and surprisingly high power, at the expense of slow movement.
And as there is are electronics routed to the arms, you could replace the moving motors entirely, and instead attach each arm end to a ring, and stack 6 individual rings. Now put the motors on the base, and rotate the rings. With some additional controls complexity (due to different driving speeds for the same angular dispalcement), you could have the rings concentric rather than stacked so they can share a common bearing plane, as the arm bases never need to cross each other.
You could (possibly) reduce the moving mass by attaching a stack of ring gears to the arms, and keeping the motors stationary. The gears wouldn’t even have to be full circles.