It’s no secret that we think flexures are pretty cool, and we’ve featured a number of projects that leverage these compliant mechanisms to great effect. But when we saw flexures used in a six-DOF positioner with micron accuracy, we just had to dig a little deeper.
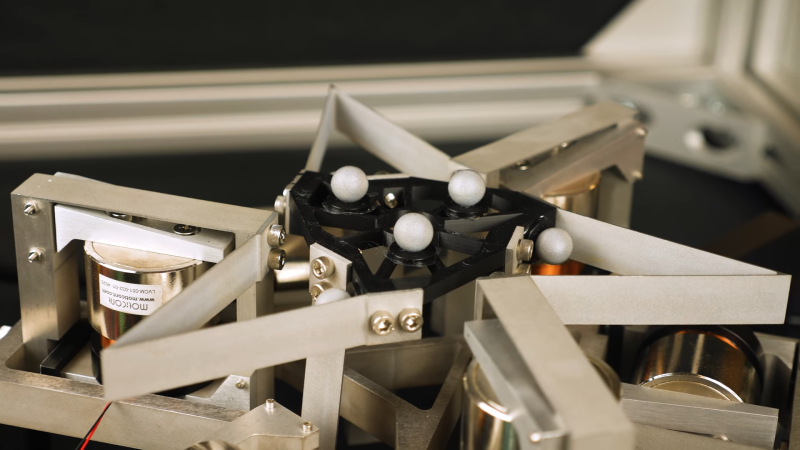
The device is known as the Hexblade, and it comes to us from the lab of [Jonathan Hopkins] at UCLA. We have to admit that at times, the video below feels a little like the “Turbo Encabulator” schtick — “three identical decoupled actuation limbs arranged in an axisymmetric configuration” may be perfectly descriptive, but it does not flow trippingly from the tongue. Hats off to [Professor Hopkins] for nailing the narration, though, and really, once you get a handle on the jargon, it all makes perfect sense. The platform is supported by a total of six flexures, which look like bent pieces of sheet metal but are actually cut from a solid block of material using wire EDM. Three of the flexures are oriented in the plane of the platform, while the other three are perpendicular to it. The far end of each flexure is connected to a voice-coil actuator that is surrounded by another flexure, this one in a parallelogram arrangement. The six actuators can move the platform smoothly through three linear translations (X, Y, and Z) and three rotations (roll, pitch, and yaw).
The platform’s range of motion is limited, but the advantages of using flexures as bearings are clear — there’s no backlash or hysteresis, and the voice coils can control the position of the stage to micron accuracy. Something like the Hexblade would be an ideal positioner for microscopy, and we can imagine an even smaller version, perhaps even a MEMS-fabricated one for nanomanufacturing applications. The original concept of the Hexblade serving as the print head for a fabrication robot for space applications is pretty cool, too, and we’d venture to say that a homebrew version of this probably isn’t out of reach either.
Thanks to [IraqiGeek] for the tip.













This reminds me of the mirror actuators on the JWST. https://hackaday.com/2022/02/08/working-model-reveals-amazing-engineering-of-webbs-mirror-actuators/
Funny because it reminded me of this:
https://youtu.be/ccnfHKZebRk
Fantastic engineering !
Great video…
But… why, why, why put that silly music in the back of the voice ?
As a non English speaking native, I have to concentrate to what’s said, and as a non engineer I have to concentrate even more to try to understand the meaning of what I’m hearing, and that “noise” in the back is so, well, de la merde (sorry), that all my concentration is going : “WHY, WHY, WHY THAT HORRIBLE NOISE ?”.
I’m really not the video kind of guy, preferring pictures, text I read ten times until I understand, I can make a break whenever I want, and, eventually, listen music, real music, the one I like, not silly annoying chip-tune.
As silly as it may sound, purporse is: to widen an audience.
(a two pages elaborate how background music expand range and reach) – which I have not energy to write before first coffee ;)
So many videos I would have watched but didn’t because I hit the back button as soon as loud nobnoxious “music” started. I agree it is even worse when they do it over speaking.
You could go to the paper, shit… it is paywalled :(
Enable subs (if available) and mute ?
As a native English speaker, I found it more effective to turn the audio off completely.
With out being previously immersed in the technical jargon, and individual component names, this non stop train of verbiage is completely indigestible. A simple pause after each statement with a silent visual representation of the meaning implied would go a long way to help the uninitiated grok the finer points of the concept.
That being said, it is a fascinating bit of engineering that spurs the imagination.
But get a proper story board and script before you present to the potential investors!
I do not totally get the mechanics. Each of the actuators is connected with a flat bar that can take a large momentum along the long side but easily bend in the direction of the short side.
Since all the bars make a turn on their way from the actuator to the platform the direction of “easy bending” of the second part always lies in the direction of the stiffness of the first part. So how is this supposed to work? Just by balancing the bending forces? Then I don’t believe it can achieve a few microns precision.
I tend to agree. The axes are only as decoupled as to the degree they are aligned to be orthogonal. I also think the motions would be non-linear as all getup. I suppose these could all be calibrated out. Which leaves lash as the big advantage?
Interesting! But why are they sweeping parameters in inches while all the other units are metric? So weird…
That was some very impressive engineering and analysis!
Hmm, fascinating, thanks for post :-)
Could we make a small version to place inside the mouth with appropriate dental accessories regarding DIY dentistry, Fuji 9 looks like a suitable compound to toy with & that might just offer some apatite ;-)
Cool.
There might be is room for improvement:
The stage itself is flexing, and somehow I doubt that it doing so is part of the design.
I suspect that that the stresses on the flextures with angles is higher than the linear length. Perhaps a little filleting would extend the life of those parts–though making those parts stiffer would lessen the flexible segment of the flexture.
Dan Gelber has some flexture videos here: https://www.youtube.com/user/dgelbart/videos
Most of the device is 3D printable : )
The electronics to drive 6 voice coil motors is going to be tricky, I think. The thing can only hold position as long as current is supplied, but I guess it’s not for applications where the position needs to be held for long. I wonder what a little ripple on a power supply is going to do to the positional stability/accuracy/precision. I think you’re going to want to use very linear currents to power the motors as opposed to PWM. Maybe PWM with some heavy low pass filtering would keep it stable, but that will slow response time. I would expect the positioning accuracy is going to be a function of the step size in the D to A converters driving the current sources.
Maybe this could be used in a 3D printer to allow printing on a less than ideal bed- instead of using a flat bed that is trammed, and moving the main Z axis, you shift the bed a bit to follow it’s unflatness and get that first layer stuck down, then go to moving the Z axis normally. Oh, I shouldn’t have said it. Now someone will do it and it will start showing up in all the cheapest printers.
And again we are to be reminded that accuracy does not equal precision does not equal resolution.
Interestingly, there is no position feedback on the stage itself, despite using notoriously inaccurate linear actuators — they use optical tracking to close the loop and also to measure performance. Without access to the paper it’s hard to tell if they used any kind of other reference for accuracy.
Even though it’s obviously an academic exercise the authors did an admirable job characterizing the performance vs size. I’m sure the student got his Masters degree with no trouble.
I thought “Hmm, might be neat to try this”. Then looked up the motors. $637.52 each. OK, pass.
They’re just voice-coil motors- coils of wire and cylindrical magnets. I would think that workable equivalents could be built without too much trouble. Maybe use voice coils and magnets from old woofers…
Check out the PI-usa (Physik Instrumente) positioning stages, and the sticker shock will seem relatively inexpensive for the sub-micron repeatable precision.
A hobby project required something similar, and as such I took a long detour to find out this problem is a lot more complex than it initially looks. ;-)
+100 for never saying “use case” or “granularity”! So refreshing. I wonder if they have seen the antennas damping research from Hughes Research in the 1970’s by Robert Forward? Active dampening of satellite antenna shaft vibration modes with piezo drivers. I have the paper hear somewhere and have never seen anyone use it. It must be common knowledge today.
Piezo damping is used in things like ‘silent bars’ for CNC machining (actively suppresses tool chatter).
Great stuff! I find it interesting that they went for a full 6-DOF design, considering that this is intended for a 3D printing application. Since 3D printing is agnostic around the axis pointing out of the nozzle, they could have saved some weight and space by going with a 5-DOF design. Unless of course, there’s a perfectly good reason for needing all 6 that I’m missing lol.
The flexture looks nice, but the presentation is atrocious.
Quite irritating background “music” and all the breating pauses have been cut out which makes the voice a bland wall of sound. I could not stand more then two minutes of it.
A couple people complained about this. I found it concise and easily understood. The music didn’t bother me but was certainly not needed. People today, particularly younger ones who are phone-focused, are very aware of production values and story flow. You so much DIY video is full of “what you wanna do now is you wanna”. This video is crammed with information in a small space and it is presented in a cogent and well ordered manner, at least for me. (I’m not clear on why you need micron level precision to print space station structural members.)
A great group already DOES use flexures for microscopy:
https://openflexure.org/projects/microscope/
And it’s all open source and 3d printable!
Here’s an interesting voice coil / flexure hexapod that was used by Google engineers to improve camera stabilization algorithms. https://www.youtube.com/watch?v=PIbeiddq_CQ&t=480s