When you think of a robot getting around, you probably think of something on wheels or tracks. Maybe you think about a bipedal walking robot, more common in science fiction than our daily lives. In any case, researchers went way outside the norm when they built an avocado-shaped robot for exploring the rainforest.
The robot is the work of doctoral students at ETH Zurich, working with the Swiss Federal Institute for Forest, Snow, and Landscape research. The design is optimized for navigating the canopy of the rainforest, where a lot of the action is. Traditional methods of locomotion are largely useless up high in the trees, so another method was needed.
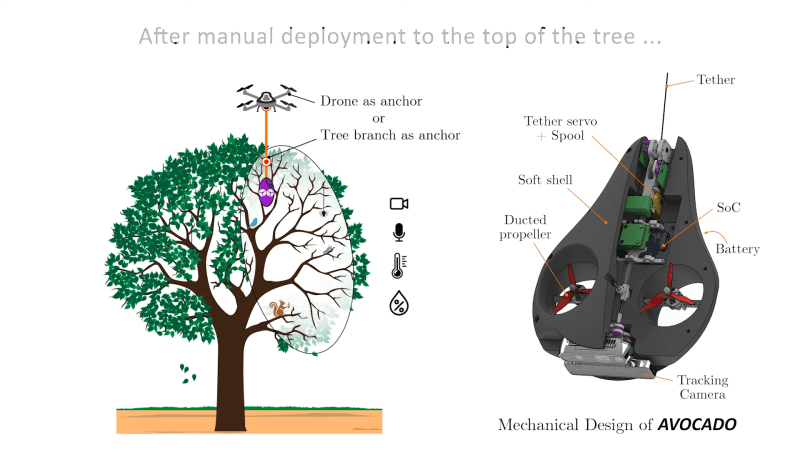
The avocado robot is instead tethered to a cable which is affixed to a high branch on a tree, or even potentially a drone flying above. The robot then uses a winch to move up and down as needed. A pair of ducted fans built into the body provide the thrust necessary to rotate and pivot around branches or other obstacles as it descends. It also packs a camera onboard to help it navigate the environment autonomously.
It’s an oddball design, but it’s easy to see how this design makes sense for navigating the difficult environment of a dense forest canopy. Sometimes, intractable problems require creative solutions.














Better than strapping a camera to a monkey.
Clever, but I have doubts about its ability to ascend again after making its way down through/between obstacles for any meaningful distance. I wish the demonstration video had been a bit longer.
There’s snow in the rainforests of Switzerland?
It looks like a drunk spider trying to reach ground in order to stop the world spinning to fast.
It doesn’t look to have the power to go back up and it lacks sensors (except the camera that points only down).
Also it looks like a fruit, so it will be picked up and nibbled. So it can count disappointed monkeys.
@Ostracus: you need to teach a moneky to install the device in a suitable place and reward it. Then you deploy more devices around the desired area. Next you train the monkey with a camera strapped on its chest to check the sensors and to bring back the ones that require maintenance. Now will have happy monkeys, not disappointed ones.
I’d be rather shocked if that spool doesn’t have the torque to reel the machine back up myself. Wouldn’t be a real problem to fix if it doesn’t though. And with the shape it has even if the fans that help it steer past obsticle didn’t have any power anymore it should slide past the branches and/or wedge open a space for it to pass back through easy enough.
That said I’m not sure quite what problem this is trying to solve, seems like an overcomplicated way to get a camera that must surely at least for now still need a human operator up a tree. But I’ve never tried to do photography in a dense tree canopy, maybe it really is well suited to the task.
So is it just left there to pollute the forest? Lame.
if you watch carefully you will see the symbols representing different sensors (camera, sound, temp and humidity) so since its loaded with sensors I’m pretty sure scientists will want their data and from how this thing was constructed it really doesn’t look like its a one off deploy and forget kinda thing.
To get the device returned to you,
you stand under the tree and aggregate the monkeys enough that they start throwing things at you.
“How does a robot with a winch in it ascend back up the wire”
the absolute state of hackaday comments
It is an anchor shaped wedge on a string, pulling itself through a tree.
Looks more like a pear than an alligator pear 🤷♂️
Honestly a pretty original little design