Here’s the thing about robots. It’s hard for them to figure out where to go or what they should be doing if they don’t know where they are. Giving them some method of localization is key to their usefulness in almost any task you can imagine. To that end, [Guy Elmakis], [Matan Coronel] and [David Zarrouk] have been working on methods for pairs of robots to help each other in this regard.
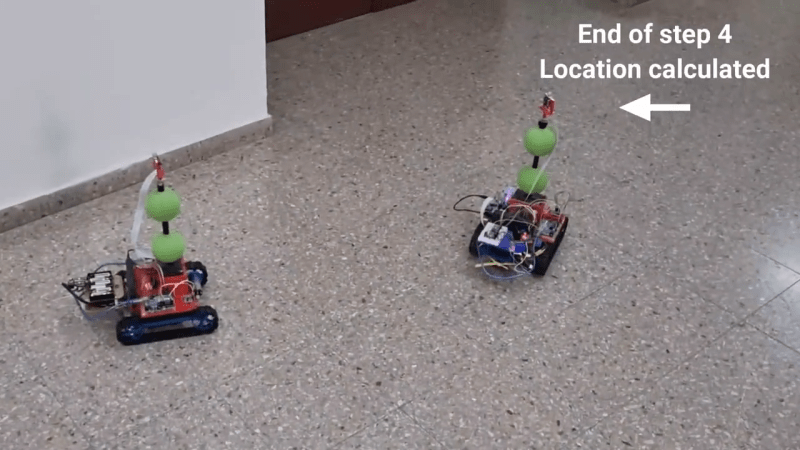
As per the research paper, the idea is to perform real-time 3D localization between two robots in a given location. The basic idea is that the robots take turns moving. While one robot moves, the other effectively acts as a landmark. The robots are equipped with inertial measurement units and cameras in a turret, which they use to track each other and their own movements. Each robot is equipped with a Raspberry Pi 4 for processing image data and computing positions, and the two robots communicate via Bluetooth to coordinate their efforts.
It’s an interesting technique that could have some real applications in swarm robotics, and in operations in areas where satellite navigation and other typical localization techniques are not practical. If you’re looking for more information, you can find the paper here. We’ve seen some other neat localization techniques for small robots before, too. Video after the break.














Next, do it like insects do and lay down a trail.
I know some use cases.
https://www.youtube.com/watch?v=Oi4KXpA9hS0
It’s more serious then the gentle music suggests.
When these cars detect another car driving backwards, they start honking their horns. And people have been complaining to that company for all those cars honking their horns on that parking lot for a while.