On this date in 1975, a Soviet and an American shook hands. Even for the time period, this wouldn’t have been a big deal if it wasn’t for the fact that it happened approximately 220 kilometers (136 miles) over the surface of the Earth.

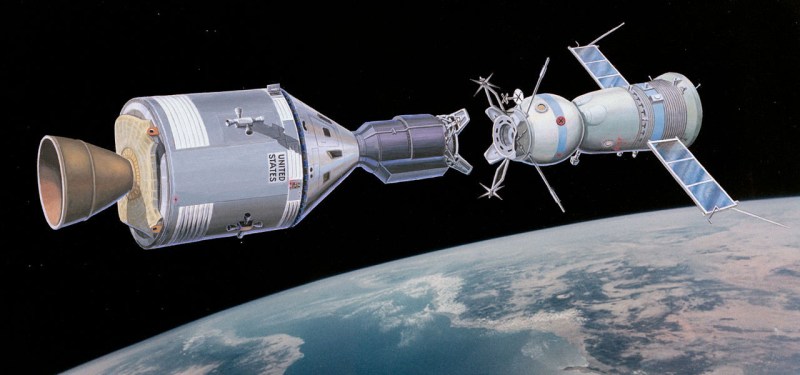
Although their spacecraft actually launched a few days earlier on the 15th, today marks 50 years since American astronauts Thomas Stafford, Vance Brand, and Donald “Deke” Slayton docked their Apollo spacecraft to a specifically modified Soyuz crewed by Cosmonauts Alexei Leonov and Valery Kubasov. The two craft were connected for nearly two days, during which time the combined crew was able to freely move between them. The conducted scientific experiments, exchanged flags, and ate shared meals together.
Politically, this very public display of goodwill between the Soviet Union and the United States helped ease geopolitical tensions. On a technical level, it not only demonstrated a number of firsts, but marked a new era of international cooperation in space. While the Space Race saw the two counties approach spaceflight as a competition, from this point on, it would largely be treated as a collaborative endeavour.
The Apollo–Soyuz Test Project lead directly to the Shuttle–Mir missions of the 1990s, which in turn was a stepping stone towards the International Space Station. Not just because that handshake back in 1975 helped establish a spirit of cooperation between the two space-fairing nations, but because it introduced a piece of equipment that’s still being used five decades later — the Androgynous Peripheral Attach System (APAS) docking system.
Meeting in the Middle
While the Apollo–Soyuz Test Project was the first time spacecraft from two different countries linked up, it was far from the first docking in space. The Apollo program relied heavily on the concept, as the Command Module and Lunar Module would dock and undock multiple times on each lunar mission. For their part, the Soviets had also docked a pair of Soyuz capsules together as early as 1967. By the early 1970s, both nations had also docked spacecraft to their respective space stations.
The problem was, the docking systems used by both countries weren’t compatible with each other. In fact, things were changing so fast that even vehicles from the same country couldn’t necessarily dock with each other. For example, an American Gemini capsule wouldn’t be able to dock with Skylab. Of course, this isn’t terribly surprising. At this point, most of the hardware was mission-specific, and only flew once.
What was the Apollo–Soyuz Test Project needed was a standardized docking interface that took into account the lessons learned by both countries so far. By 1970, Soviet and US engineers had started meeting and exchanging information to decide what such a docking standard would look like. It was decided early on that this new docking standard should be androgynous — rather than having distinct “male” and “female” variants as was the norm with earlier docking ports. In this way, the same docking port could be used to support two spacecraft docking together as was planned for the Apollo–Soyuz Test Project, while at the same time allowing a vehicle to dock to a space station.
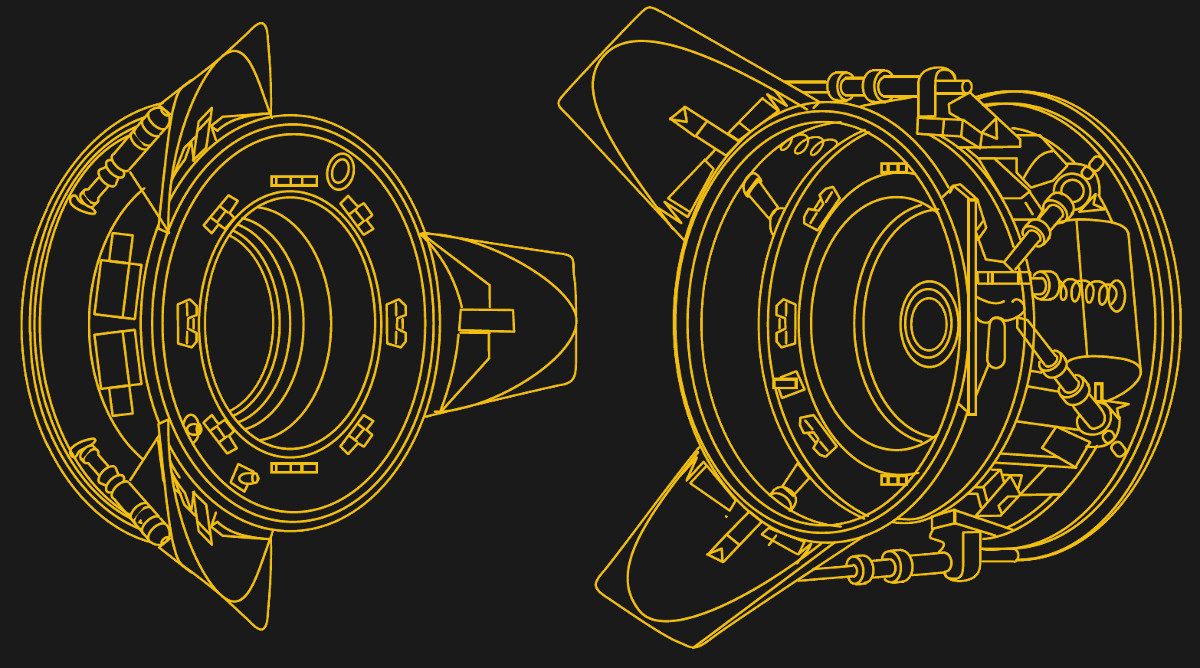
This capability was so key to the design that the docking standard ultimately came to be known as the Androgynous Peripheral Attach System. While the US and Soviet versions did differ slightly, they were mechanically compatible with each other. Some elements of the design were the result of a compromise, such as the overall diameter of the port being limited to the size of the existing Apollo and Soyuz capsules, but otherwise it was hoped the concept would prove useful for future missions and spacecraft from both nations.
Built to Last
The Apollo–Soyuz Test Project was the only time an Apollo and Soyuz spacecraft docked in space. In fact, it was the last time an Apollo spacecraft flew — after the conclusion of this mission, there wouldn’t be anther crewed American mission until the Space Shuttle came online nearly six years later.
But once the Americans started flying the Shuttle, and the Soviets had established their Mir space station, it wasn’t long before the two would meet. The Soviets had already designed a modified version of APAS that they called APAS-89, which was intended to allow the Buran spacecraft to dock with Mir. Buran never made it past the testing phase, but the work on the docking port ended up being adapted once more for the Shuttle. This final version of the standard became known as APAS-95, and was used until the final Shuttle-Mir mission in June of 1998.

APAS-95 performed so well during the Mir missions that it was decided the Shuttle would continue to use it for the International Space Station. In addition, APAS-95 (as well as a modified “hybrid” version) would also be used to hold together the core US and Russian modules of the Station.
It was the defacto docking standard used until the introduction of the International Docking Adapter in 2015, which converted the exposed APAS-95 ports used for visiting American spacecraft to a newer design to be used by modern vehicles such as the SpaceX Dragon and Boeing Starliner.
While it has now been retired for the International Docking System Standard (IDSS), the ISS is still being held together by APAS-95, and will remain that way until the space laboratory is eventually de-orbited. Not a bad legacy for a technology initially developed for a simple handshake.














Just for fun, check out the “ISS Fan Club”. The ISS is sending slow-scan TV images all week. Then pull up your favorite ISS tracker and figure out when it will be overhead. The signal is crazy strong so you can actually pick it up on a handheld radio that can listen on 145.800MHz FM (like a Boafeng). There are SSTV apps that will literally listen to the signal and decode it to an image, such as Robot36 on Android. Last night I pulled down the Apollo-Soyuz image with Slayton and Leonov hanging out.
Found a guide and some test audio in case you wanna run it through an SSTV converter without a radio:
https://amsat-uk.org/beginners/iss-sstv/
Cool! Robot36 is the name of the Android application,
but also the SSTV standard that MIR used to use.
In case you wonder, it used an highly compact TSC-70P converter, which was cutting-edge in the 90s.
https://tinyurl.com/nh9wjrdy
ISS uses PD120, in VGA resolution, which can be decoded via MultiMode on Macintosh, for example.
Or QSSTV on *nix platforms. On Windows, MixW2/MixW3 could be used, I think.
PD120 was also being supported by WinPix on Windows 3.1/95, I believe.
Robot36 was/is among the fastest and most complex SSTV modes, because timings are so tight (line-sequential color in just 36 seconds).
Interestingly, it’s also among the oldest modes, dating back to the original SSTV standards of the 60s/70s.
The only other early standard was frame-sequential color SSTV.
It used 3x 8 seconds pictures, one each for red/green/blue (RGB).
Taking picture was possible with a b/w camera, a color wheel and an SSTV converter with three DRAM-based memory channels (R,G,B).
– Almost like the Amiga users did with NewTek’s DigiView frame grabber in the 1980s! :D
A rotary switch was used to select memory channel, a push button to take an image.
On the receiving side, green picture was often used by viewers/listeners with ordinary monochrome equipment.
The green filtered image was closest to an ordinary monochrome picture.
Color users could relax, many SSTV converters did combine the 3 individual pictures after receive and display a color picture.
Robot-8 was the first Robot mode and became synonymous with monochrome SSTV.
However, it’s not exactly same as the original 8 second standard (50Hz countries: 7 seconds).
For example, Robot-8 supports an ID (the VIS code) and uses 4:3 aspect ratio.
Modern Slow Scan Converters also can sync on their own and ignore sync pulses.
By contrast, original 8s SSTV equipment had used square aspect ratio and used the sync pulses.
This was both bad and good.
The sync pulses work like carriage return on a typewriter
and help making the picture look straight, but loss of pulses will result in lost lines, too.
That’s why the pulses aren’t really used anymore.
Because with sophisticated equipment it’s not needed.
In principle. Unfortunately, not everyone has that.
Or if the conditions interfere the pictures will be skewed.
Causes are unreliable shortwave, doppler effect in space etc.
Which means it’s pretty common that SSTV pictures are distored.
Good SSTV software thus tries to compensate with algorithms.
PS: the Portal games have some SSTV easter-eggs!
It’s fun to encode/decode SSTV signals.
Also if you’re into retro computing. Various SSTV software exists for DOS, C64 and ZX Spectrum.
The cool thing about Robot-8 is that it is so quick! :D
You can use it during a normal conversation.
Back in the day, radio amateurs did exactly do that.:
Use 8 second SSTV during a normal conversation, to share pictures of the station, the pet or the operator.
There is currently a ham radio event running right now to commemorate the anniversary: Slow scan television images transmitted from the ISS: https://www.ariss.org/upcoming-sstv-events.html Receive your own images from space. It’s running until Jul 20.
More info also at https://amsat-uk.org/2025/07/11/sstv-from-the-iss-in-july/
This political stunt wasted Apollo hardware that was supposed to be used for another lunar mission.
THe CM and SM, maybe. Not the S-1B launch vehicle, though — that was leftover from the unused Skylab Rescue mission.
Everything after Apollo 17 had already been cancelled (in September 1970) well before the ASTP mission was agreed (April 1972, although talks had started the year before). Also, the CSM (CSM-111) used on this mission, was a surplus one designed for H missions, not the later J missions (although it’s entirely possible it could have been upgraded).
So no, none of the hardware used for the Apollo Soyuz Test Program was taken away from a lunar mission, even if the Apollo program still had funding.
Maybe it was in this rendezvous mission that when they joined Leonov made a toast saying: “the important thing in meal is not what you eat, but with whom you eat”. I’m not sure.
Na, I don’t think the cosmonauts had looked down upon these astronauts so much or had felt uncomfortable.
I think that deep within they surely knew that despite their origin these guys weren’t inherently bad but just human beings, too.
Ah, I see. It was not about whether or not the statement is true,
but rather about the origin of the quote. So please never mind. Englisch isn’t my fist language.
It looks like the US were afraid that their pilots could forget their names.