
[Niklas Roy] sent in probably one of the largest line following robots ever built. The Gallerydrive project is used to move visitors around an art gallery. It can follow either a black or white line. It also has a touchscreen display for displaying information about the art which is read from RFID tags. Niklas has a full diary of the build on his site with everything you need to build your own.
Robots Hacks2448 Articles
Defcon Bot Challenge Prototype
[Colin] sent in his prototype for the Defcon bot contest. The performance of the bot in the video is impressive. Hit it after the break. His build looks clean and simple – he even managed to score some sponsorship in the form of pololu servo controllers. Targeting the moving white sensor reminds me of the old MacGuyver episode with the lethal heat seeking robots.
If you’re working on any attack bots, feel free to let us know via the tips line.
Update: I woke up to realize that I forgot to embed the video. It should work now.
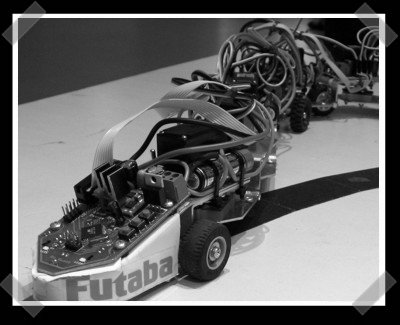
SickSack: ATMega Servo Snake Robot
[Lars] sent in this sweet snake robot that he and [Aske] built for the DTU Robocup. I’ve seen snake bots before, but I like the concept and the clean electronic design. They used a single AtMega32 controller to generate PWM signals for each of the eight servos, and used a very interesting DC-DC buck converter that’s capable of delivering 16 amps.
For the curious, the bot won the best design and effects award at the competition.

Sunday Wifi RC Car Extra
Just a heads up for the linux guys before I hit the hack. If you’re using madwifi drivers, make sure you update em. A remote exploit was released. the researcher played nice and got with the development team before releasing the details.
I’ve been pondering a wifi controlled RC car robot project. I’m thinking of an onboard motherboard and a big battery supply. After considering my own ideas, I like to poke around and check out others. It’s inspiring and I almost always find something I can use adapt or abuse. For the wifi RC car, several have been created already.
The Wi-drive is really an exercise in embedded systems and software control, but looks interesting. Sadly, it appears to suffer from the ‘our college gave us this dev box’ syndrome.
The WRT54G turned RC car is pretty sweet. The router is running a servo control daemon, providing a cheap mobile wireless dev platform.
This star climbing enabled monster truck hack looks very promising as a build platform. It was designed to be autonomous, but it could easily be adapted.
Not be forgotten, Ashish’s laser rangefinder based autonomous rc car.
If you’d rather keep the car stock, you could interface the transmitter with a pc with a simple ppm signal generator.
Then there’s the RC car telemetry project.
Got any more worthy projects? Shout out.
Make A Small Coilgun (aka Coilosapien Update)

Remember the coilosapien? I hopped over and found that [marcus] wrote a tutorial on his mini coil gun. He beefed up a disposable camera charging circuit with some extra capacitors to drive the coil, and used a small servo for his automatic reload mechanism. Everything you need to arm your robots.
Coilosapien: Rail Gun On Yer Robot

It’s been a while since we’ve seen anything new on the robosapien front, but I’d say that a laser sighted rail gun for our favorite robots is worthy. From the video, it appears to have decent accuracy and a fair sized clip. It’s creator, [Marcus] says that he’ll have a tutorial up soon. Thanks to [Robert] for the tip. (Update: The tip says it’s a mini rail gun, so I’m not sure if it’s a rail gun or a coil gun.)
Cakebot: Mindstorm Cake Slicer
[Per Elmdahl] sent along this one. I usually go for weaponized Legos, but who doesn’t like cake?









