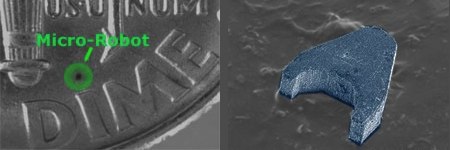
The NanoRobotics Lab at Carnegie Mellon University has come up with a medical robot that can be swallowed, and is then able to be controlled from outside the body. The device has small arms with adhesives that can attach to slippery internal surfaces, which has previously proven difficult. Once inside the body, it can be used to view damaged areas, deliver drugs, as well as biopsy questionable tissues, and possibly even be used to cauterize bleeding wounds with a small laser. The device could be stopped, and even reversed to get a better look at areas that may have gone unnoticed otherwise. This would be a major advancement in diagnosing intestinal problems, and could lead to potentially life saving treatments. Did we mention that it has lasers?
[via Neatorama]