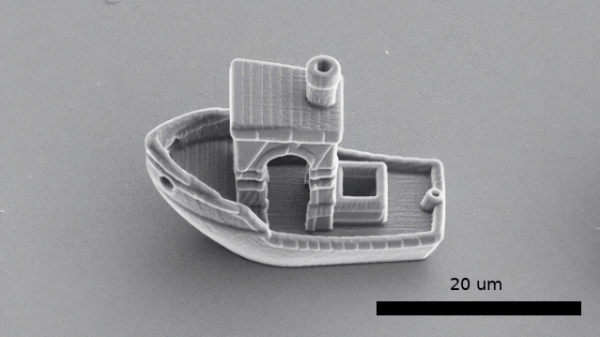
We’ve said it before, but we cast a wary eye at any superlative claims that come our way. “World’s fastest” or “world’s first” claims always seem to be quickly debunked, but when the claim of “World’s Smallest Benchy” is backed up by a tugboat that two dozen E. coli would have a hard time finding space on, we’re pretty comfortable with it.
Of course the diminutive benchmark was not printed just for the sake of it, but rather as part of a demonstration of what’s possible with “microswimmers”, synthetic particles which are designed to move about freely in microscopic regimes. As described in a paper by [Rachel P. Doherty] et al from the Soft Matter Physics lab at Leiden University, microswimmers with sizes on the order of 10 to 20 μm can be constructed repeatably, and can include a small area of platinum catalyst. The catalyst is the engine of the microswimmer; hydrogen peroxide in the environment decomposes on the catalyst surface and provides a propulsive force.
Artificial microswimmers have been around for a while, but most are made with chemical or evaporative methods which result in simple shapes like rods and spheres. The current work describes much more complex shapes — the Benchy was a bit of a flex, since the more useful microswimmers were simple helices, which essentially screw themselves into the surrounding fluid. The printing method was based on two-photon polymerization (2PP), a non-linear optical process that polymerizes a resin when two photons are simultaneously absorbed.
The idea that a powered machine so small could be designed and manufactured is pretty cool. We’d love to see how control mechanisms could be added to the prints — microfluidics, perhaps?










