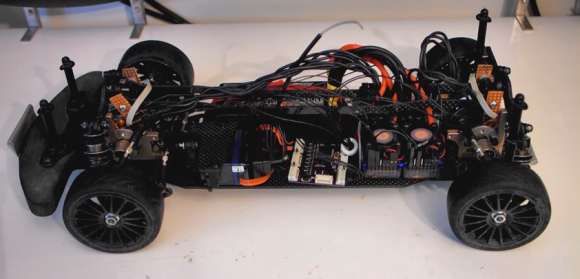
The picture above looks like a standard four-wheel drive (4WD) touring car. As one looks closer, a few strange things start to pop out. Where’s the motor? 4 electronic speed controls? What’s going on here? [HammerFET] has created this independent drive R/C car (YouTube link) as a research platform for his control system. The car started off life as a standard Schumacher Mi5 1/10th scale Touring Car. [HammerFET] removed the entire drive system. The motor, differentials, belt drive, and ESC all made for quite a pile of discarded hardware.
He replaced the drive system with 4 Turnigy brushless outrunner motors, installed at the chassis center line. To fit everything together, he had to 3D print new drive cups from stainless steel. The Mi5’s CVD drive shafts had to be cut down, and new carbon fiber suspension towers had to be designed and cut.
The real magic lies in [HammerFET’s] custom control board. He’s using an STM32F4 ARM processor and an InvenSense MPU-6050 IMU which drone pilots have come to know and love. Hall effect sensors mounted above each motor keep track of the wheel speed, much like an ABS ring on a full-scale car.
[HammerFET’s] software is created with MATLAB and SimuLink. He uses SimuLink’s embedded coder plugin to export his model to C, which runs directly on his board. Expensive software packages for sure, but they do make testing control algorithms much simpler. [HammerFET’s] code is available on Github.
Since everything is controlled by software, changing the car’s drive system is as simple as tweaking a few values in the code. Front and rear power offset is easily changed. Going from a locked spool to an open differential is as simple as changing a value from 0 to 1. Pushing the differential value past 1 literally overdrives the differential. In a turn, the outer wheel will be driven faster than it would be on a mechanical differential, while the inner wheel is slowed down. Fans of drifting will love this setting!
[HammerFET] is still working on his software, he hopes to implement electronic torque vectoring. Interested? Check out the conversation over on his Reddit thread.















Love the idea. Really cool that he managed to do it on a touring car.
Is it still as fast, though?
I think it’s faster than with all the drivetrain magic.
You’ve got torque and power of four motors instead of one. Sure, each of the motors is weaker than what he may have had before, but it still sums up when you use four instead of one.
And you have no losses due to drivetrain design.
This is a great model for what many of us in the Formula Hybrid SAE program have developed or currently working on.
Very Cool!
Too bad there probably aren’t any real full size applications for your research… ICE cars out for obvious reasons and you’ll lose a lot of efficiency adding 4 smaller motors to EVs. Might be useful for experimentally determining the best diff settings using scale models – though a pen/paper approach would probably do just as well…
Er, yeah. I’m guessing you’ve not heard of the “Mercedes SLS Electric Drive” car as it is a full-sized equivalent to [HammerFET’s] RC car (and given the things he mentions in the video, I wouldn’t be surprised if it wasn’t partly inspiring it).
I’d recommend checking out the Chris Harris YouTube video (part of his /Drive channel) on the Merc, part car review but also part technical dive around what it can do.
No, No I hadn’t heard of it – not that into cars and must have missed it in the video. I stand corrected – though the merc still does not have the same capabilities as [HammerFET’s] RC car’s diff and uses only one BLDC motor as the power house. My efficiency comment was about some plant feedback param he mentions that can be set >1 allowing the back to slide out more (yeah, i really don’t know cars). The Merc cannot do that.
It is the same; 4 independent motors (with gear boxes in the case of the Merc), they’ve just built a pair of motors for an axle into a single block facing each other but, as mentioned by one of the designers, one motor doesn’t know what the other is doing.
One of the interesting things mentioned by Chris Harris was how much of a change doing tricks like negative torque or over-driving a wheel make to the feel of the drive (something that can’t be done as significantly as a car with an ICE which can only really brake wheels or stiffen suspension), effectively changing the chassis dynamics.
No idea how the parameters in [HammerFET’s] control system relate to real-world behaviour (in a full size car) but the Merc appeared to be an interesting testbed vehicle for those kind of tricks (which Chris Harris was happily getting the back end out on), so perhaps it can?
as a RC car fanatic and a gear head I think this a great idea, independent control of each wheel and less mechanical slop in the driveline.
yah.. I think there is plenty of real world application of this, if some of it had not already entered the market in EVs. Some revised form of Formula 1 for example.. but any hub driven EV really. Sell this idea to Tesla.
This really isnt about efficiency but maad control through cornering and possibly showing off through very controlled drifting, with acute control of each wheel individually both acceleration and braking, you can force the car to take corners quicker amongst many many other things.
I’ve been ‘schooled’ ;)
For fun is as good a reason as any & looking at the Merc, efficiency is the last thing on anyone’s mind.
Differential overdrive and other tricks are already in production, current-generation Range Rovers do it, and you can bet if one manufacturer is doing it, others will be too. OK the control mechanism is different but the principle where rubber meets tarmac is the same
does not age well, in fact was not bright to begin with.
FETS are already highly loaded devices, use faster ones and a higher clock cycle and you can account for any situation.
Apparently he managed to do it on a 1/18nth scale buggy as well, doing hub motors instead of mid chassis because they fit.
I’ve always thought this would be the way to go for crawlers. However one thing about this that seems strange to me is a stainless 3d printed drive cup? he could have turned that out on a lathe in a fraction of the time i just do not get why that was done.
over all very very nicely done
one takes computer skills, the other mechanical skills
so why learn mech skills when you already have access to 3d printer and particular part is 50 clicks away?
I’m sorry but this attitude is just sad in todays world IMHO.
Using the tools available to you is sad? Gosh I’d better go beat some rocks together to make a knife.
“However one thing about this that seems strange to me is a stainless 3d printed drive cup? he could have turned that out on a lathe in a fraction of the time”
One reason would be near 100% precision and repeatability – model once, print as many times as you need.
But what I find more interesting is the claim of a stainless steel 3D printer. Is that accurate, or were they referring to a CNC milling machine? I’ve never heard of a 3D printer that could print metals… at least not at small scales.
Selective Laser Sintering maybe?
Why not put omniwheels on that thing?
Wonder how many RC enthusiasts are flipping out over this this club racers.
Size it up a little bit and you can do sick donuts:
https://www.youtube.com/watch?v=EaKmdz_CV6w
This has got to be the ultimate throw up machine.
I would love to see this technology in the hands of a professional R/C car driver like Chris Grange who helped develop the mi5
During hard acceleration, during extreme cornering or when the tarmac is not sticky and flat, wouldn’t this four wheel drive setup be severely limited in the amount of power it could apply to the road? During hard acceleration most of the weight and traction is on the rear TWO tires. In a hard corner, most is on ONE tire. Wouldn’t that be like limiting total power to 25%? My RC truck I did around 1999 went a different route. It only had one motor, but three torque vectoring diffs and encoders for feedback.
Neat build though. Hats off to you.
This is beyond amazing! I’m on the search for in wheel motors, and likely ready to start design my own if I have to. But the software and and board send awesome. What’s the status on this project anyway? Will the board be available similar to how openpilot is available?
Hi there currently trying to do what you have done here. Could you send me a list of the parts used in this especially the hall effect sensors. Also how much did this cost?
i wonder how is with the steering. I mean the tires are rolling with the same speed is there any problem?