Car manufacturers will often tout a vehicle’s features to appeal to the market, and this often leads to advertisements featuring a cacophony of acronyms and buzzwords to dazzle and confuse the prospective buyer. This can be particularly obvious when looking at drivelines. The terms four-wheel drive, all-wheel drive, and full-time and part-time are bandied about, but what do they actually mean? Are they all the same, meaning all wheels are driven or is there more to it? Let’s dive into the technology and find out.
Part-Time 4WD
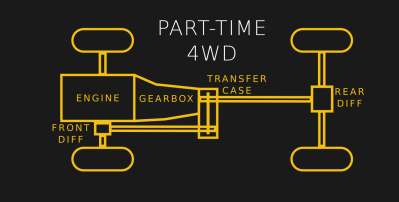
Part-time four-wheel drive is the simplest system, most commonly found on older off-road vehicles like Jeeps, Land Cruisers and Land Rovers up to the early 1990s, as well as pickup trucks and other heavy duty applications. In these vehicles, the engine sends its power to a transfer case, which sends an equal amount of torque to the front and rear differentials, and essentially ties their input shafts together. This is good for slippery off-road situations, as some torque is provided to both axles at all times. However, this system has the drawback that it can’t be driven in four-wheel drive mode at all times. With the front and rear differentials rotating together, any difference in rotational speed between the front and rear wheels — such as from turning a corner or uneven tyre wear — would cause a problem. The drive shaft going to one differential would want to turn further than the other, a problem known as wind-up.




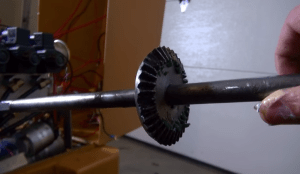 After several years of hard life, the loader came to [djMedic] in need of some TLC. The biggest issue was that the rear axle bevel gear had lost several teeth. This gear is under enormous loads when the loader is turning. A gear made of harder steel was the easy answer. Thankfully, you can order
After several years of hard life, the loader came to [djMedic] in need of some TLC. The biggest issue was that the rear axle bevel gear had lost several teeth. This gear is under enormous loads when the loader is turning. A gear made of harder steel was the easy answer. Thankfully, you can order