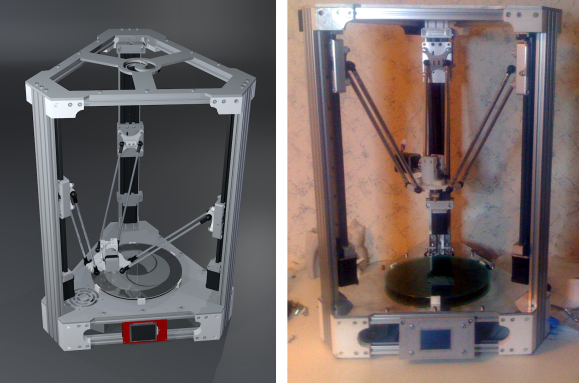
From concept to completion this delta-style 3D printer (translated) is a sweet build. The quality of the work comes as no surprise. We’re familiar with [Arkadiusz Spiewak’s] craftsmanship from that H-bot type 3D printer we saw from him back in April.
Planning started off with a render of the design using Blender 3D. Not only did this give him a 3D model to use as his building reference, but the animation framework allowed him to test the kinematics of the design. After ordering an extruded rail system and assembling the frame he found the pillars had too much flex to them due to the rails used on the top and bottom. The fix was to mill a top and bottom plate to stiffen things up. After testing out the motors and the extruder head mount he made one final design change. He exported his Blender design as dxf files to cut and weld an aluminum replacement for the extruder mounting platform. As you can see in this video, the preliminary results are looking good!














Very nice! I wonder what the advantages of the Delta style printers are, because they seem to have a smaller build area relative to their size.
The main advantage of Delta robots are the agility of the end effector – relatively small motions of the 3 actuators translate to large motions in the effector. Many pick and place robots use this architecture for that reason. The tough part is keeping the machine rigid and holding tolerances well.
Also I forgot the modularity – each actuator is the same so the build can be more modular and easier to manufacture.
No, the main advantage is that errors are not additive. In a normal stacked xyz setup, the final error in positioning is the sum of all the individual errors. In a configuration like this, the error is averaged. He could have used 4 or even 5 connecting rods (overkill) to make it even more rigid and precise.
The speed/rigidity/envelope tradeoffs other people have mentioned can be tuned according to geometry, or you can use arms that telescope rather than relocate.
In an XYZ motion controller, there are 21 sources of error. These all play on each other in many ways. The error is not simply the sum of the individual errors. In a Delta style motion system, you still have a complex build up of errors, which is from at least 16 sources
One of the big advantages I can make out is speed. The design seems very very fast. It is also incredibly stable since you can keep the motors at the base.
On more advantage is the parts count is much lower and platform remains stationary and you have no moving steppers (assuming you use a Bowden extruder). Also they look really cool.
I don’t care how well it works, it just looks awesome. I might finally take the plunge into 3D printer territory if there was a kit for this.
If you are getting into 3d printing the roestock max is supposed to be pretty good. I am getting a makibox, they are dirt cheap, and are approaching production now.
If you want a really solid printer, go for the Kossel Pro. http://www.kickstarter.com/projects/ttstam/openbeam-kossel-pro-a-new-type-of-3d-printer
There are tons of deltas made with aluminum extrusion…plus probably hundreds more on thingiverse.
Kossel
Kossel Mini
Kossel Pro
Rostock Max
Rostock
Cerberus Pup
You are right, there are tons of deltas using extrusions. My goal was to make delta that can use direct drive extruder withour any major problems. I really dont like bowdens. So in my printer, all parts that effect actuator are made from aluminium, and im using of the shelf parts. Even frame can be assembled without printed parts.
Also lead screw driven linear rails are nice.
+1 to you Sir.
These Deltas are fascinating to watch but pain in the neck to calibrate. It’s much more difficult than in cartesian printer where the axis travel accuracy pretty much only depends on how well the rails / bearings are manufactured. So, if you’ve got good rails, you can be certain your travel is perfectly linear. Not so with Deltas, everything affects the travel – the linkage and joints tolerances, the motor non-linearities, acceleration etc.
I honestly don’t know if they have any particular advantage when it comes to 3D printing (although I absolutely agree with people saying that they are awesome to watch in action). In robotics, Deltas are used for speed – since the travel is the result of combined efforts of all three (or six in a different delta configuration) motors, you can have all motors contributing to the moving force and you can have mind-boggling acceleration with these Deltas. None of that applies to 3D printing, of course. 3D printing is more dependent on accuracy than on speed.
But, once again, I love seeing these Delta printers move even if their printing results are usually sub-par.
I think the real biggest advantage is that all the axis are equal instead of having 2 axis on belt drive and one on a threaded rod.. at least that is what my experience is !
There is also an excellent write up on delta ord bot by Bart Dring here http://www.buildlog.net/blog/2013/01/the-delta-ord-bot/
As an Ultimaker guy (have one, work for them), and with contacts at http://www.3dreamfactory.com/ who make a pretty awesome delta bot. I say, those delta’s are easier to increase the Z height, you just need longer belts and guides. But it won’t beat an Ultimaker in printing accuracy.
They do beat an Ultimaker in looking awesome. Seeing a delta bot move is like seeing magic in action, but then with more mechanics.
Don’t know about “magic” per se but they certainly do look “alive” when they move. A very pretty sight!