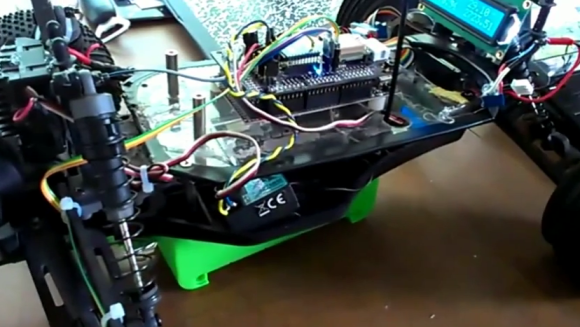
Check out this autonomous RC car which [Jason] built for the chipKIT design challenge. It’s been able to successfully navigate a planned route taking just a few waypoints as inputs.
Obviously this uses a chipKIT as the controller, the max32 to be specific. [Jason’s] write-up shows off all of the components of the design, but you’ll have to head over to his recently posted update to hear about the custom board he had spun to host them all. It starts with a GPS module, but that’s only accurate enough to give the rover the big picture. To handle getting from one waypoint to the next successfully he also included a gyroscope which provides very accurate orientation data, as well as optical encoders on the wheels for on-board distance traveled information.
We hope he’ll keep refining the design and make a trip to next year’s Autonomous Vehicle Competition.














Interesting. How does it circumvent obstacles?
And for once a real RC car was used instead of a wallmart junk, making the design a bit more universal/standard/adaptable…
*Wal-Mart
people of Wal-Mart they are everywhere
nice work!
hopefully some AVC contestants will start showing off their rigs as well!
awesome
Can u pls help me to knw more about this.in deep.. am also working on a similar project.. needed some giudance.. plssss
Nice work! We built a similar project. However, we installed an Android device onto a RC car and used an IOIO board instead to control it autonomously. Here is the preliminary result:
http://youtu.be/vkvkfcqEUkk