If you’ve ever spent time in a modern BMW, you’ve probably fussed about with the goofy iDrive controller. It’s a rotary knobbery slidery thing that just never really feels that good to use. [Garage Tinkering] was inspired to try and build a better version for his own car.
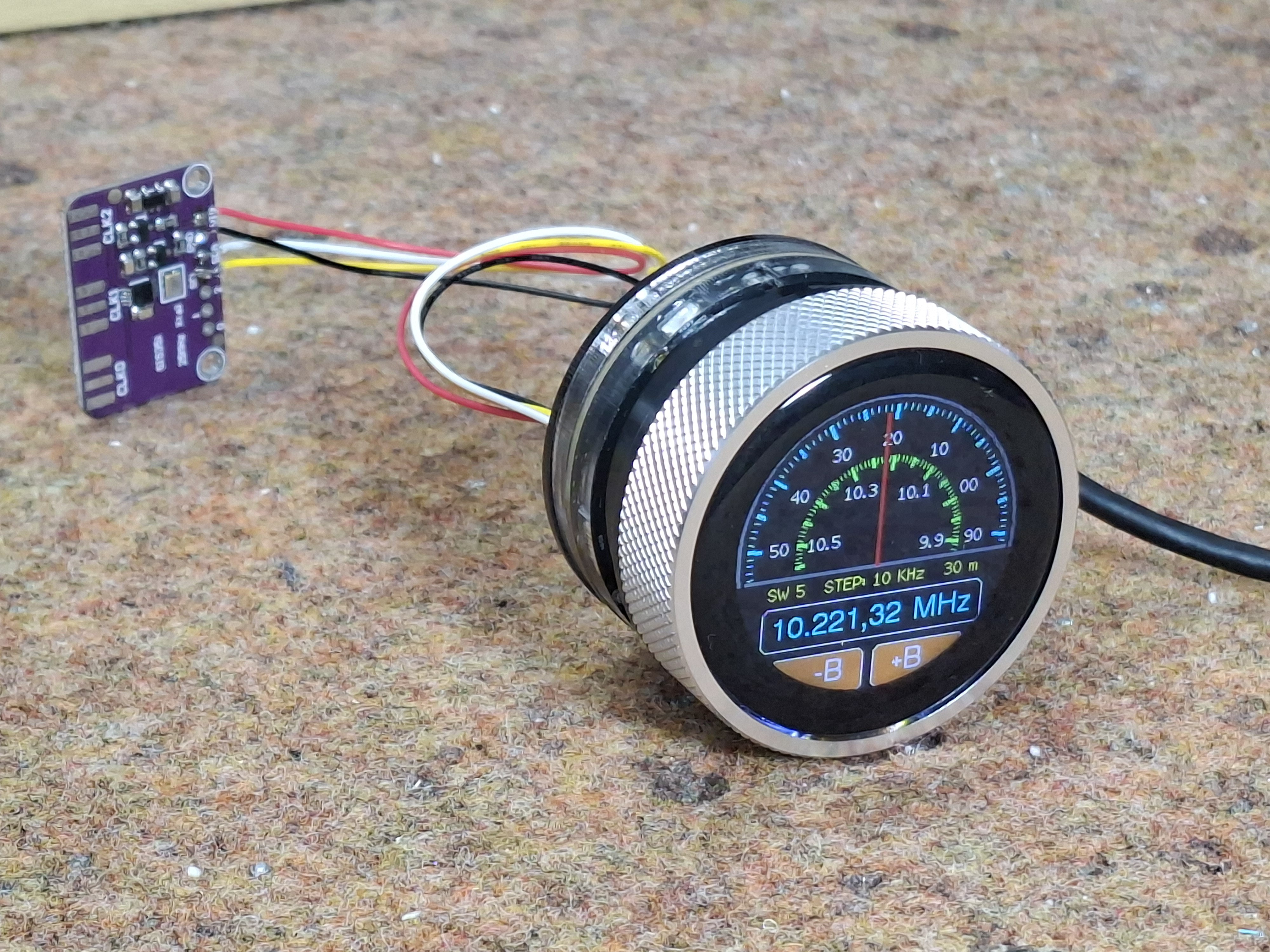
The first order of business was to choose the right knob as the core of the build. [Garage Tinkering] eventually landed on the Crowpanel 1.28″ rotary knob which integrates a push-button encoder, a round screen, and an ESP32-S3 all into one convenient package. He then set about designing a 3D printed housing that would integrate it into the vehicle’s interior, along with a diffuser ring for the knob’s inbuilt LEDs and some additional buttons for added control. The goal is to use the rotary control as the human interface for a broader system being implemented in the vehicle, which will feature a larger infotainment screen and multiple digital gauges. The rotary control will allow switching things like interior and underglow lighting, and display of other vehicle parameters.
The cool thing about building your own gear is that you can make it work exactly the way that suits you. We’ve seen great hacks in this realm before, too, like this rad car data display.
Continue reading “Building A Better Automotive Rotary Controller”