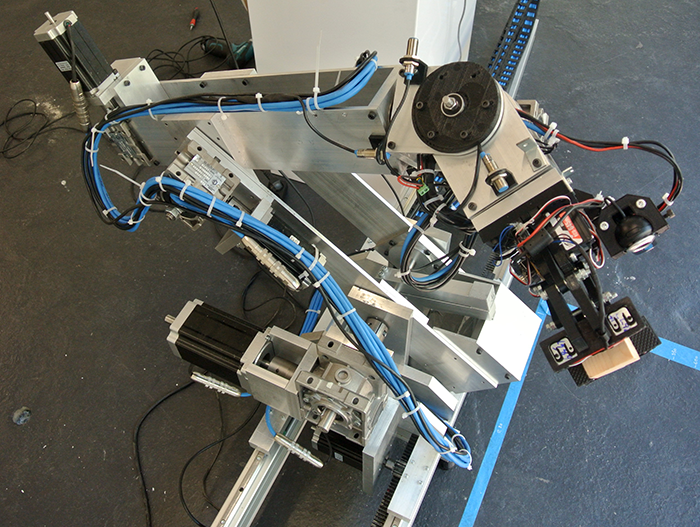
With a background in software engineering, [Kris Temmerman] decided to make a physical demonstration of his knowledge in the form of a six axis robotic arm… the final product is a delicious display of mechanical eye candy.
Built from mostly aluminum stock, [Kris] machined the bulk of his parts with a CNC mill which he picked up for cheap from China. These custom pieces coupled with some hefty stepper motors ensure the arm’s accuracy as it twists freely and slides along the gantry it’s mounted to. Though the majority of the arm is metal, the hand at the end of his robot was built with 3D printed parts and can be switched out with the future attachments [Kris] plans to design. This classic gripper piece is driven separately with its own Arduino brain controlling the individual servos in the fingers. 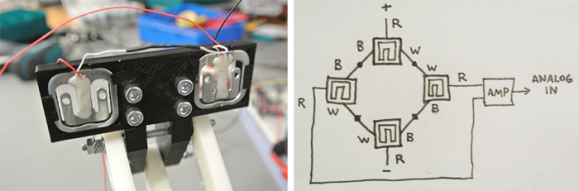
Each finger includes some load bearing sensors which [Kris] harvested from an old scale so that the gripper can tell whether or not it has a hold of an object without crushing it. To orchestrate the robot’s movement, he wrote some nice looking software in C++ which visualizes the inverse kinematics at work in each point of articulation. For the sake of demonstrating his creation in action, he whipped up a basic demo that can locate and move colored blocks laid at random on a surface. A small camera mounted on the hand determines the orientation of the blocks relative to the machine so that the wrist can rotate itself in the proper alignment in order to pick them up.
[Kris] documented the build of his robot in a fascinating speed video which includes footage of the finished arm in action at the end:














Every day I am less afraid of our coming robot overlords as it seems that nobody designs robots with position feedback anymore.
Shhhh, the MatLAB EE students can’t even do their own PID loops anyore…
We are safe for now…
made my day :D
some of us can
So true, it seems like people are afraid of closing the loop. Granted it adds a layer of complexity but considering how complex this system already is its a minor overhead for significant reliability and control gains.
even amongst my fellow control engineering students, i see a tendency to shy away from closing loops, which basically undermindes the entire purpose of calling it CONTROL engineering.
my unique perspecctive comes due to the fact that because of personal reasons, i have not finished my studies in the usual time, and i am currently repeating my last 2 semesters for the third dime in the row.
this allows me to notice trends across generations….
there will be fewer and fewer people that will know how to tune simple long-tim-constant PID loops, let alone robot overlords.
Hi,
I too am a EE, whose grasp on closed loop control theory is very weak, how do you recommend I go about getting a better understanding of this subject.
I want to learn fresh right form the beginning.
If only we could all have a workshop like this!
His experience with software really shows through.
Does anyone know what code editor he was using that had the color syntax highlighting?
looks like xcode, most programmers editors these days have syntax highlighting.
Definitely Xcode. I use the same color scheme.
Confirmed xcode. I clicked the link and it’s an xcode project.
You sure about xcode, guys? Might also be Sublime Text, doesn’t it?
Dam! It’s an Apple product and intended as a full SDK or IDE.
I use Crimson Editor for HTML, PHP, Javascript, xxSQL.
I need something for LUA, Verilog, VHDL, C++, C#, Micro assembly (ARM / AVR / CISC).
Crimson Editor will probably do LUA but it’s more for web based code.
Anyone know of a decent simple editor with good color highlighting for the above languages?
I don’t want a full blow IDE like Eclipse, just something simple that I can use with Atmel Studio (Previously AVR Studio) and Xilinx ISE Design Suite.
Sublime text – you will not want for anything else ever again.
Thanks Daniel, I will give it a go.
Truly, the arduino plugin for sublime is quite a wonder
pfft, that appears to be a commercial product. How is it better than Kate?
The same way a more expensive prostitute is better than a cheap one.
Sublime is nagware, you can use it indefinitely without paying anything. And it’s so good you will consider paying money for it :)
Crimson was superseded by Emerald AFAIK. I use Komodo Edit which I’m fairly fond of :)
I’m a Notepad++ kind of guy when I just want an editor with some syntax highlighting and tree expanding/collapsing. You can define your own language if it isn’t in the extensive list too. It’s the first thing I install on any machine I have to spend more than two hours on these days.
Sublime looks pretty awesome, hadn’t heard of it before. But tossing in a plug for Notepad++ as well. Color syntax in that one, and you can quite easily set up your own color scheme for personal file extensions.
Put a dremel on for the hand and make it into a cnc. Kickstarter material there.
I was thinking tool changer for his cnc.
Load bearing sensors? You mean load cells?
uhh do want
ok a few chats, we’re building some, join us in my garage, weekends!
Very nice.
I am jealous of his available time and access to resources. Would love to do a project like this myself.
Surely thats more than a home shop and a purely hobbyist project? That project looks like its in the $600-$800 range…
Maybe I’m just jellous that he has enough room to keep the horizontal bandsaw IN his shop…
Hardly someone’s home, unless they live in their company’s machine shop. I think ‘home-made’ is really stretching it a bit.
He claimed that it was, which didn’t seem like much of a stretch since my home has similar toys. =]
This is just.. gorgeous
Something that nice is just asking for some real servo motors. Otherwise great build!
he could easily add some diy encoders, and make them the servos.
Wow – great video, great build.
Armatron did it with one motor.
I cannot express the amount of disappointment i had when i opened up my armatron hoping to convert it to computer control… it was clever though
Same here. It is a brilliant little piece of engineering like you say. I ended up doing like the guy on yt on building the transmission out of legos and I definitely learned a trick or two. I doubt the same thing could/would be built today.
Linear axis instead of rotational joint at the base =/
It looks great though
Whenever I hear “inverse kinematics” now:
http://scbots.tumblr.com/image/52438762119
Why the robot shakes like hell?
what is the maximum weight it can grip and hold?