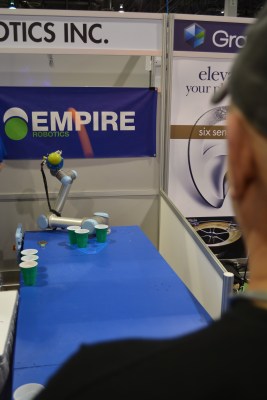
 Wandering the aisles of Eureka Park, the startup area of the Consumer Electronics Show, I spotted a mob of people and sauntered over to see what the excitement was all about. Peeking over this gentleman’s shoulder I realized he was getting spanked at Beer Pong… by a robot!
Wandering the aisles of Eureka Park, the startup area of the Consumer Electronics Show, I spotted a mob of people and sauntered over to see what the excitement was all about. Peeking over this gentleman’s shoulder I realized he was getting spanked at Beer Pong… by a robot!
Those in the know will recognize that the bot has only 3 cups left and so the guy definitely was giving it run for its money. But the bot’s ability to swish the ball on nearly every throw accounts for the scoreboard which read Robot: 116, Humans: 11. Unlike the ping pong robot hoax from last March, we can vouch for this one being real!
If you’re trying to attract the geek demographic, this must be one of the best offerings ever shown at a trade show. Empire Robotics manufactures the VERSABALL gripper. We know this as a jamming gripper and have been looking at the tech progress for many years now. Looking back to this Cornell research video from 2010 we realize it is based on the white paper which [John Amend, PhD] co-authored. He’s now CTO and Co-Founder of the company and was one of the people running the booth. We love it when trade show booths are staffed by the engineers!
Join me after the break for a rundown of how the system works along with a video clip of it hitting the target.
These jammers work by pumping air in and out of an elastic bladder filled with a granular material. We most frequently see them built using coffee grounds and even things like shower heads. We’re sure the granules in this model are part of the secret sauce but did get as far as finding out that natural sand is one of the ingredients in the mix and that humidity in the air doesn’t have a noticeable effect on the gripper’s performance. Once common use is to gang together several onto one robot arm which can then pick up and move oddly shaped items in a manufacturing process. But…
It’s awesome at Beer Pong
Insanely awesome, actually. We asked about the physics for throwing the ping pong balls. [John] admits he pulled out an old physics text-book when working on the demo. The trick was to minimize flight time because their tests showed that left/right error increases with time of flight. At the same time they wanted to enter the cup at a high angle to minimize the chance of hitting the rim. From this quote it sounds like a big part of the demo was “studying” lots of great beer pong players:
I’m now pretty sure that good beer pong players are unconsciously solving this same optimization problem, which is why the flight paths of their shots all look very similar.
Knowing where to aim


The targeting system uses a set of magnet sensors embedded in the table. They look for magnets in the cups to know if that location should be used as a target. The person tending the game takes away a cup each time it is successfully filled with a ping pong ball.
Here’s a quick clip of a successful launch. The audio is pretty rough because the conference is loud and [John] and I were talking as the robot spun up, but I left it in there so you can hear what the vacuum pump sounds like as it grips.














Hmm, surely there should be a loss of coordination in the robot when it has to drink. Otherwise it’s just cheating.
I thought about this, but what if it never misses?
You don’t drink if you miss, you drink if your opponent gets a ball in your cup. So the robot would need to drink once in a while even if it never misses.
Damn straight! Make the robot chug a beer before a shot! I like the way the gripper inflates to throw though.
My College’s IEEE chapter has wanted to do this for a while for Catapult pong during E-Week… Looks like we got beat to it
Saddly under-appreciative… Please don’t read this, I’m grumpy…
I mean, we’ve been capable of calculating trajectories of projectiles in ideal-conditions over *miles* for quite some time… The only difficult part was the human-factor (and wind) in the actual launches, and both are removed here…
It’s cool to see in action, but does anyone with any (even small) background in physics consider this noteworthy? Show me a robot playing *actual* ping-pong! Or at least a bounce or two…
Sorry… I’m grumpy, It Is Cool.
If you know it’s not a good post, then why did you post it?
This is Hackaday. It is not Thingyou’veliterallyneverseenbeforeaday, nor Cuttingedgeresearchanddevelopmentaday.
I like the idea of these websites !
Well, BFB, actually, despite belligerence, maybe there’s something to be learned from this experience. A) There seem to be some pretty decent responses consisting of some pretty good ideas/explanation B) Some disgruntled-hacker somewhere usually ends up posting something like this much more belligerently and much less apologetically, maybe my “beating ’em to it” will result in their not doing so, period.
B was my reasoning in posting it, A was just a nice result. I’d say this is one of the few times I’ve been pleasantly-surprised by the results of my belligerence.
meh, you wrote “PLEASE don’t read this” BFB lost all rights to criticize when “he” read it… B^)
I like the idea of introducing a bounce!
It’s actually hard to build stuff to do things even if you have the math showing how to do it.
The physics of the situation are much more complicated than just the projectile.
There’s a lot of EE in the motors,ME in the kinematics of the joints and physics in the inertia and energy of the moving bits.
It’s not easy at all. (At least not easy for me (or for people who actually build things instead of thinks about them.))
I’m impressed.
Good call.
Let me be the first to welcome our new drunken robot frat brother Overlords.
RoBroVerlords
AHHH, now did I just not read this, or was the description updated?
This grabber-technology is actually quite interesting. I thought it just had suction sucking the ball up. Does the grabber technology also shoot, or is there air-pressure behind it?
grabs with vacuum. look at jamming grippers for more info.
They are often passive released, gently letting go as pressure returns to the bladder.
This one however is actively releasing by feeding pressure into the bladder….tossing the ball.
Who makes the arm?