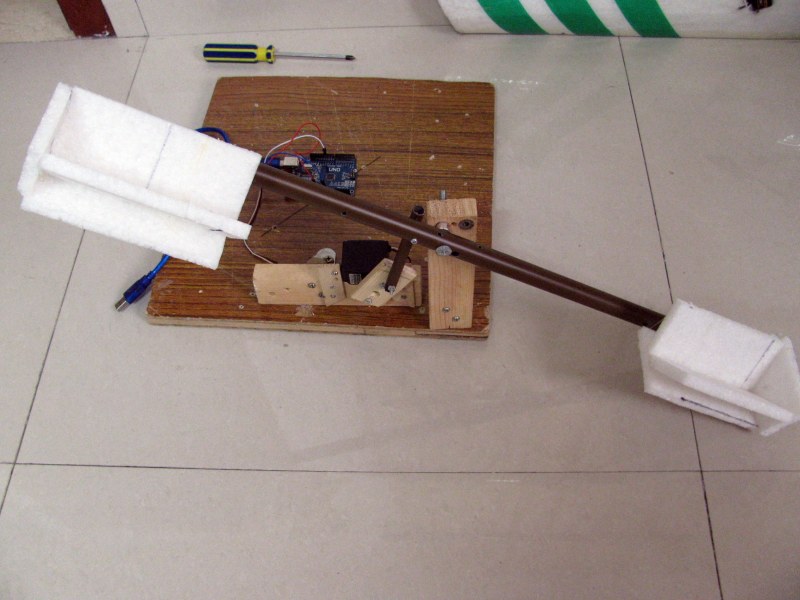
A fan of kinetic projects, [Jimmy Demello] threw together a pretty cool robot that can bounce a ball back and forth between its hand(s).
Made from scraps around the house, it consists of some wood, a piece of a fishing pole, chop sticks, a single servo motor, and of course an Arduino Uno. His original plan was to make [Claude Shannon]’s juggling robot, but this is as far as he’s gotten — so far anyway.
It bounces a 2cm ball-bearing twice before catching it and passing it back again. He thinks it would be an awesome project to scale up and use basketballs, and we’d have to agree.
And for more robotic fun, [Jimmy’s] also made an automatically actuated Newton’s Cradle!
For a more sophisticated juggling robot, you’ve gotta check this one designed by the Department of Control Engineering at the Czech Technical Institute in Prague — it’s capable of juggling five balls at once!














Those are pretty cool.
I wonder how the leap motion would cope with the task of watching a few balls to coordinate a juggling robot.
Maybe a different approach could be to put wireless accelerometers in the balls themselves. I guess the quick way would be to put a matrix of IR distance sensors on the sides of a box and place the robot inside.
Cool, but what do the electronics do? Couldn’t it just use a geared motor with a crank and pushrod?
Yea that would be a better final approach, maybe he just did it this way as a proof of concept/he just used what he had on hand, still neat though.
Try this to improve your coordination and ability to manipulate things when you can’t see them. Toss things hand to hand with your eyes closed.
Start safe with a Koosh ball. Then go to a tennis ball, handball or racquetball. When you can pass one of those back and forth at least 20 times without a miss, find a steel or iron ball 1.5 to 2 inches diameter.
When you can do it with the metal ball, try bigger ones like basketballs and beachballs.
Tired of round things? Try any irregular shaped object you can easily hold in one hand.
+100
I love how the Newton-ball thing claps with excitement before starting again.