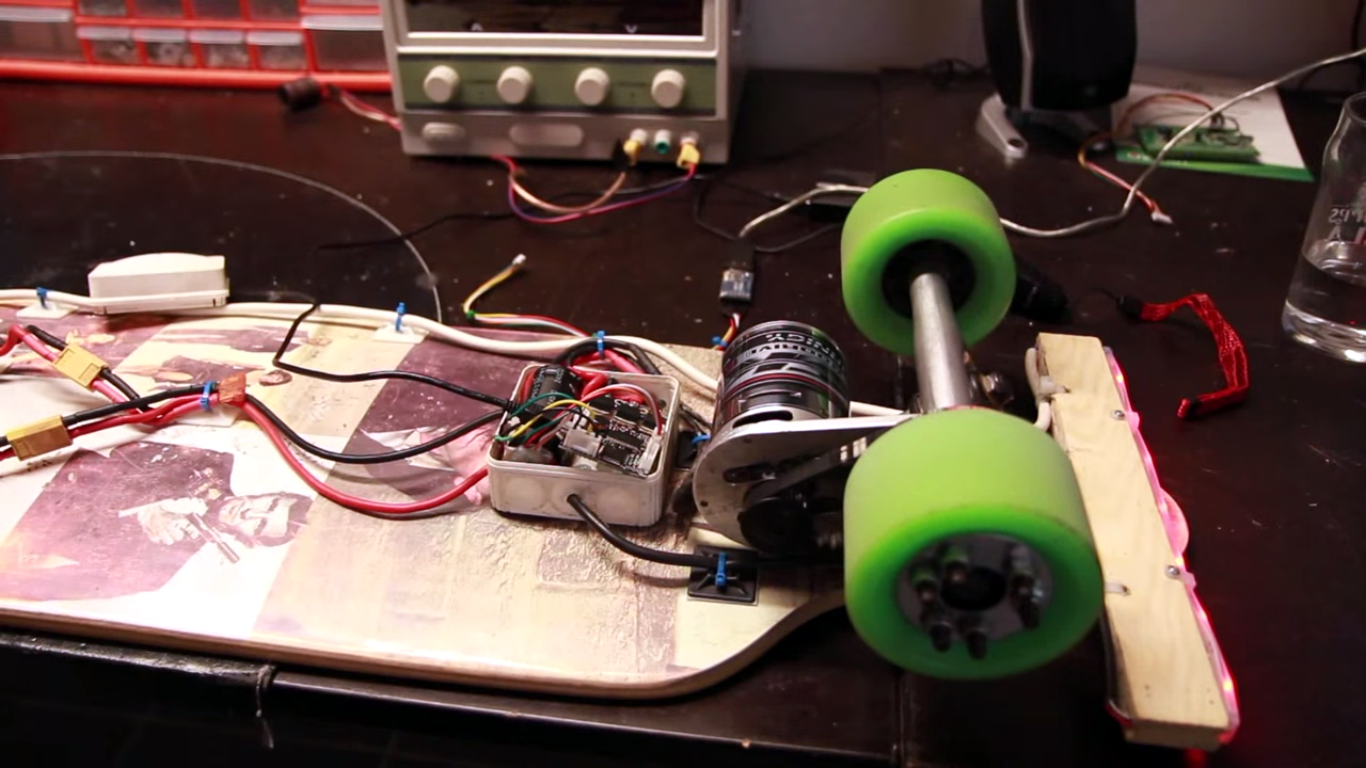
For electric and remote control vehicles – from quadcopters to electric longboards – the brains of the outfit is the Electronic Speed Controller (ESC). The ESC is just a device that drives a brushless motor in response to a servo signal, but in that simplicity is a lot of technology. For the last few months, [Ben] has been working on a completely open source ESC, and now he’s riding around on an electric longboard that’s powered by drivers created with his own hands.
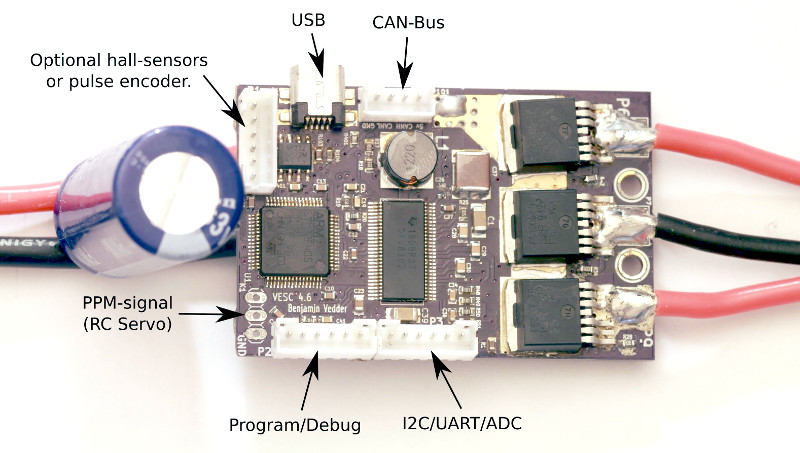
 The ESC [Ben] made is built around the STM32F4, a powerful ARM microcontroller that’s able to do a lot of computation in a small package. The firmware is based on ChibiOS, and there’s a USB port for connection to a sensible desktop-bound UI for adjusting parameters.
The ESC [Ben] made is built around the STM32F4, a powerful ARM microcontroller that’s able to do a lot of computation in a small package. The firmware is based on ChibiOS, and there’s a USB port for connection to a sensible desktop-bound UI for adjusting parameters.
While most hobby ESCs are essentially black boxes shipped from China, there is a significant number of high performance RC pilots that modify the firmware on these devices. While these new firmwares do increase the performance and response of off-the-shelf ESCs, building a new ESC from scratch opens up a lot of doors. [Ben]’s ESC can be controlled through I2C, a UART, or even a CAN bus, greatly opening up the potential for interesting electronic flying machines. Even for ground-based vehicles, this ESC supports regenerative braking, sensor-driven operation, and on-board odometry.
While this isn’t an ESC for tiny racing quadcopters (it’s complete overkill for that task) this is a very nice ESC for bigger ground-based electric vehicles and larger aerial camera platforms. It’s something that could even be used to drive a small CNC mill, and certainly one of the most interesting pieces of open source hardware we’ve seen in a long time.
Thanks [Totalis] for sending this one in.














Don’t forget ragebridge. Is this for smaller loads?
RageBridge is for 2 DC brushed motors. This can do both DC-brushed and 3phase DC-brushless.
Hopefully Charlez works on the Brushless Rage platform again soon.
Great project. This is exactly what I want to see on Hackaday–thanks, [Brian Benchoff]! The note at the end about CNC milling was particularly apt since I recently built a light-duty CNC spindle which uses a chinese BLDC and ESC:
http://reboots.g-cipher.net/spindle/
The GUI app to analyze ESC performance and tune the parameters is a terrific enhancement. I’ll have to take a serious look at VESC.
Same for me. Also using an outrunner for powering my spindle.
Would be nice if we could have an ESC that is fully configurable. Gonna keep an eye on this project.
How well does regenerative breaking work with lithium batteries? The amount of features this ESC boasts makes it all kinds of appealing for ebikes! It wouldn’t take much reworking to give it absurdly huge current handling ability, too. Very, very nice work!
it works well enough for tesla
Almost perfectly. Li-po is very forgiving to the exact charge profile, as long as the current is within bounds, and you do not overcharge it (then it goes boom).
I was just thinking this’d be great for electric unicycles too (ebikes but one wheel, self-balancing like a segway). Definitely investigating once mine arrives.
It works really well powering my electric mountain board: https://goo.gl/photos/HWeXTTH5sBt1fNe5AA
I’m using LiFePO4 batteries with regen braking and don’t have any issues whatsoever.
A lot of the ESC parameters can be set in the UI it comes with.
The FETs barely get warm pushing 220lb at 15mph.
404
Sorry. New link:
https://goo.gl/photos/xB6yYvE4jQ7VKWmp8
This project is great. I’m going to spend a lot of time playing with this. I have no critic for the ESC project. Only praise. But ChibiStudio hit on a sore point for me.
ChibiStudio people, we have a great editor and resource in Eclipse but rather than taking advantage of an existing install by using plugins you push people to install a complete older version. 32 bit Luna.
The whole purpose of Eclipse was to have one editor, not several installs of the SAME blasted editor. I’m sorry, but this is getting old. Let me update the editor as I see fit and make plugins available instead of presenting us with yet-another-studio!
This would be great on Tindie…
Great project. There’s also a CAN-driven opensource ESC being developed for a while by multicopter folks in the Ardupilot project but this one has beaten it, and by the way here’s also a version of the SimonK firmware with simple I2C control and feedback: https://github.com/balrog-kun/tgy, with many many hours of flight logged.
Very nice.
Waiting for a shop to order the ready to use BLC
Great project! Well executed and looking totally awesome. Especially liked the test drive with overlays current draw, speed etc. +33km/h uphill is indeed more than fast enough ;). Hope I can find some time to make this or maybe his esc will hit the market soon…
wow yeh that’s a neat vid. this is a total “shut up and take my money” type thing. I want it!
link for his speedy test drive with vid overlay
https://www.youtube.com/watch?v=nGb-zt2Jp9k
Anyone know where to buy the VESC controller?
its usually an rc gt2b controller/reciever combo from hobbyking.
http://www.ollinboardcompany.com
If you could get extremely precise motion from it, the regenerative aspect would open this to building MIT-style robotic cheetahs (or at least the planetary-geared outrunner actuators).
I wonder if the sine-wave modulated PWM concept from the ultra-slow brushless motor driver (http://hackaday.com/2015/04/20/driving-a-brushless-dc-motor-sloooooooowly/) could be incorperated?
You could use my project: https://www.youtube.com/watch?v=7gK_3eZ16RI
It features precise motion control ;D
Tesla, Apple, Google, Porsche, etc. would love to have him on their team. (c:
Ben’s work on the VESC is pure excellence. Right now it looks like he has teamed up with electric skateboard company EnertionBoards and they are selling a $120 beta version to folks who already have e-skateboards so they can help test them out. http://www.enertionboards.com/electric-skateboard-parts/vesc-motor-controller/
This is fantastic work, really enjoyed reading the blog about this, strongly considering making one!
Excellent work. I am very excited to see where this technology is going to go. What type of batteries are you using? Is that motor the Turnigy 245 KV from Hobby King?
With the regenerative breake , you save a lot of energy…10%??
Higher voltage , lower current. I also drive my e board at 8s lipo.
i need a regenerative esc like yours.. can you help me?
Great post! I really love this, thanks for sharing this.
The post you have written is really wonderful and helpful for beginner, especially the recent history was new for me. I am stay here, Good luck!