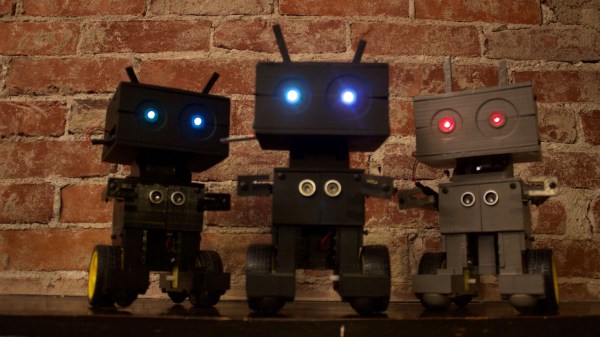
Everyone needs a cute robotic buddy, right? [Matthew Hallberg] created WireBeings, an open source 3D printed robotic platform. Looking like a cross between Wall-E and Danbo, WireBeings is designed around the Arduino platform. We do mean the entire platform. You can fit anything from an Arduino micro to a Mega2560 stacked with 3 shields in its oversized head. There’s plenty of room for breadboards and custom circuits.
WireBeings is designed to be 3D printed. All the non-printable parts are commonly available. Gear motors, wheels, the ubiquitous HC-SR04 ultrasonic sensor, and a few other parts are all that is needed to bring this robot to life. Sketches are downloaded via USB. Once running, WireBeings can communicate via an HC-06 Bluetooth module. If the Arduino isn’t enough power for whatever project you’re working on, no problem. [Matt] designed WireBeings to carry a smartphone. Just connect the robot and phone via Bluetooth, and let the phone’s processor do all the heavy lifting. What if you don’t have a spare phone? Check our report on hacks using prepaid Android Smartphones.
We could see WireBeings as the centerpiece for a “learn Arduino” class at a hackerspace. Start with the classic blinky sketch on one of the robot’s eyes. Build from there until the students have a fully functioning robot.
There is definitely room for improvement on the WireBeings project. [Matt] made the rookie mistake of going with a single 9-volt battery to power his creation. While a 9V is fine for the Arduino, those motors will quickly drain it. [Matt’s] planning on moving to a LiPo in the future. Why not stop by the project page and give him a hand?