Hands can grab things, build things, communicate, and we control them intuitively with nothing more than a thought. To those who miss a hand, a prosthesis can be a life-changing tool for carrying out daily tasks. We are delighted to see that [Alvaro Villoslada] joined the Hackaday Prize with his contribution to advanced prosthesis technology: Dextra, the open-source myoelectric hand prosthesis.
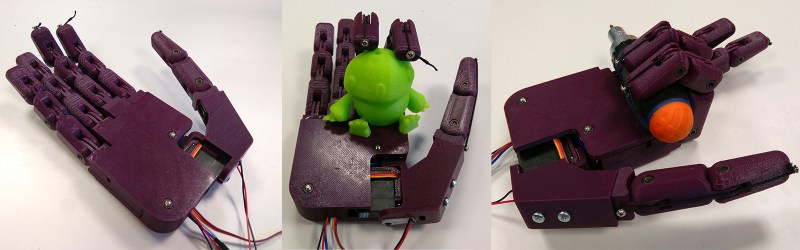
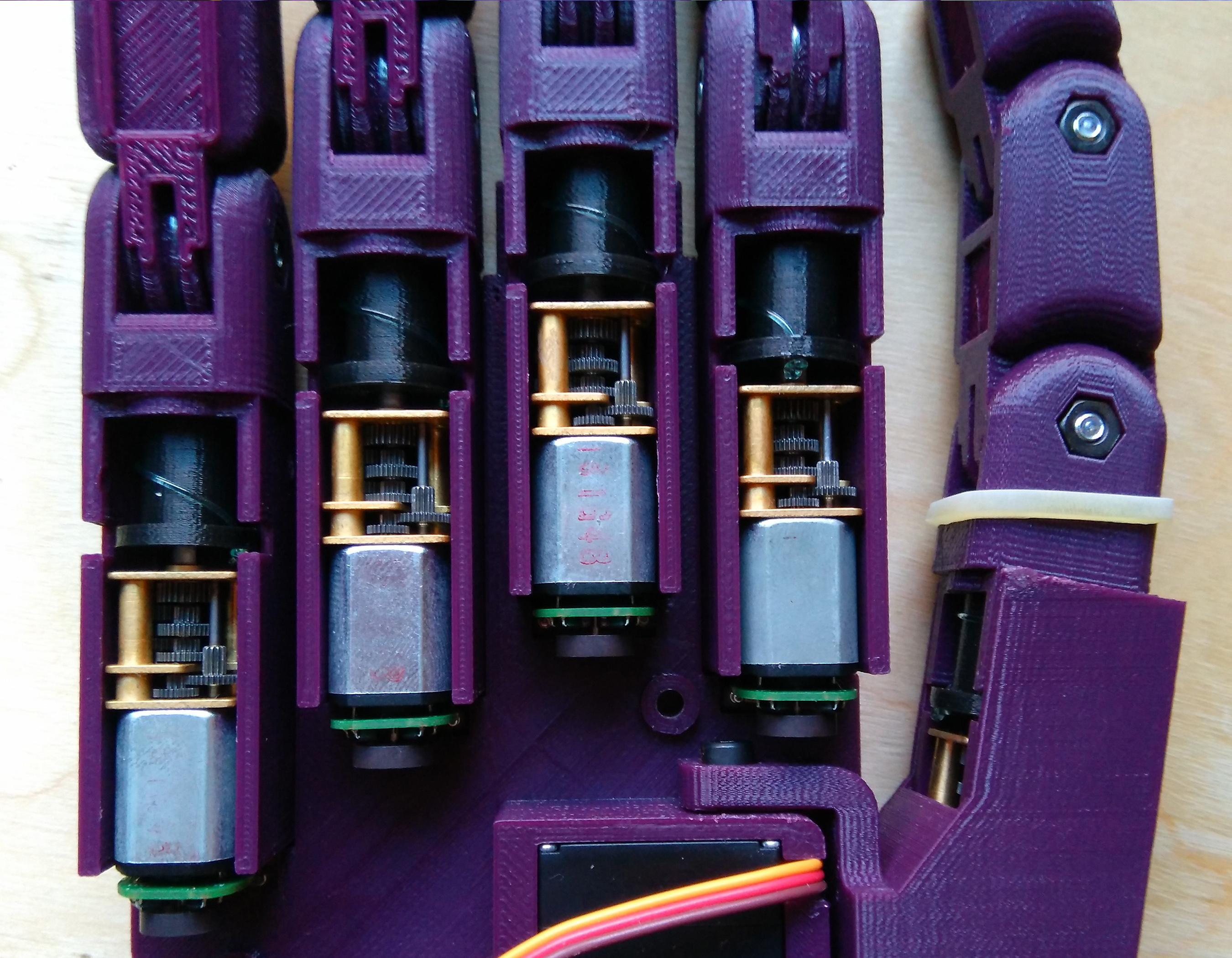 Dextra is an advanced robotic hand, with 4 independently actuated fingers and a thumb with an additional degree of freedom. Because Dextra is designed as a self-contained unit, all actuators had to be embedded into the hand. [Alvaro] achieved the necessary level of miniaturization with five tiny winches, driven by micro gear motors. Each of them pulls a tendon that actuates the corresponding finger. Magnetic encoders on the motor shafts provide position feedback to a Teensy 3.1, which orchestrates all the fingers. The rotational axis of the thumb is actuated by a small RC servo.
Dextra is an advanced robotic hand, with 4 independently actuated fingers and a thumb with an additional degree of freedom. Because Dextra is designed as a self-contained unit, all actuators had to be embedded into the hand. [Alvaro] achieved the necessary level of miniaturization with five tiny winches, driven by micro gear motors. Each of them pulls a tendon that actuates the corresponding finger. Magnetic encoders on the motor shafts provide position feedback to a Teensy 3.1, which orchestrates all the fingers. The rotational axis of the thumb is actuated by a small RC servo.
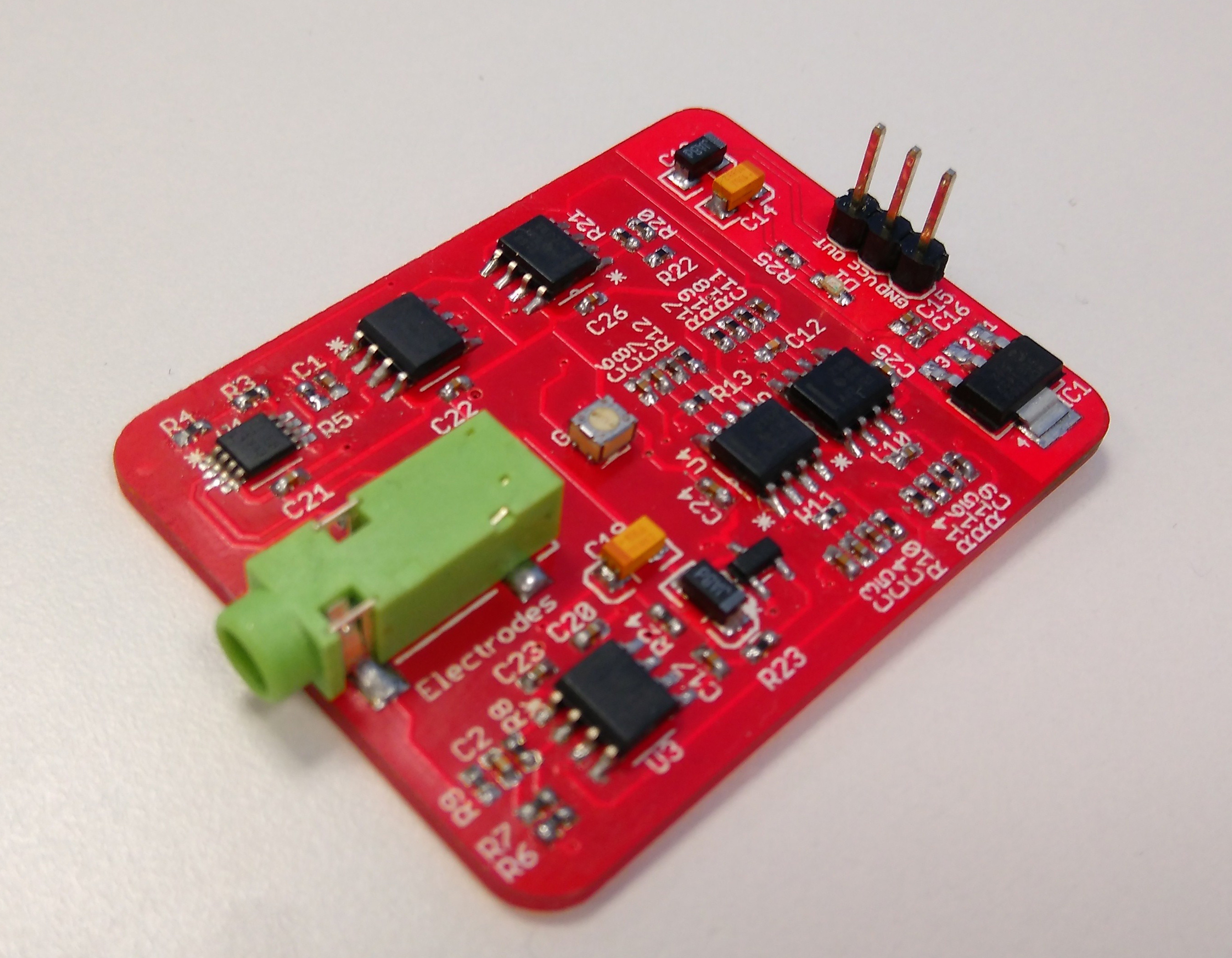 In addition to the robotic hand, [Alvaro] is developing his own electromyographic (EMG) interface, the Mumai, which allows a user to control a robotic prosthesis through tiny muscle contractions in the residual limb. Just like Dextra, Mumai is open-source. It consists of a pair of skin electrodes and an acquisition board. The electrodes are attached to the muscle, and the acquisition board translates the electrical activity of the muscle into an analog voltage. This raw EMG signal is then sampled and analyzed by a microcontroller, such as the ESP8266. The microcontroller then determines the intent of the user based on pattern recognition. Eventually this control data is used to control a robotic prosthesis, such as the Dextra. The current progress of both projects is impressive. You can check out a video of Dextra below.
In addition to the robotic hand, [Alvaro] is developing his own electromyographic (EMG) interface, the Mumai, which allows a user to control a robotic prosthesis through tiny muscle contractions in the residual limb. Just like Dextra, Mumai is open-source. It consists of a pair of skin electrodes and an acquisition board. The electrodes are attached to the muscle, and the acquisition board translates the electrical activity of the muscle into an analog voltage. This raw EMG signal is then sampled and analyzed by a microcontroller, such as the ESP8266. The microcontroller then determines the intent of the user based on pattern recognition. Eventually this control data is used to control a robotic prosthesis, such as the Dextra. The current progress of both projects is impressive. You can check out a video of Dextra below.
We are happy to see that the open-source community has become such a driving force in the development of advanced, robotic prostheses. It is projects like Open Hand Project, Openbionics, Enabling The Future and now Dextra and Mumai, which are paving the way to affordable and available robotic prostheses.


















There’s a wide array of prosthetic and robot arm projects in the Hackaday prize this year, which makes me very happy.
It’s about time we started to take back development of medical devices, the costs for some of these things is staggering and there’s very little innovation.
I’m not suggesting that we design our own pacemakers, but we should be able to tinker in ways that are not normally life threatening. Building your own prosthetic hand would definitely qualify, and I can see no reason for the enormous expense of modern medical certification in these cases.
This is a good first step.
(And I’m personally waiting for a prosthetic that’s remotely linked to an enhanced robotic device, such as this one: http://www.loupiote.com/photos/21635234876.shtml)
Speaking of medical devices, I hear that hearing aids (pun intended!) are still ridiculously expensive these days. I’ve read about a couple of attempts at doing something about it, but.. it seems all the attempts just kind of fizzled out after a promising start.
Hearing aids are one of those odd solutions where you keeping beating the snot out of something that’s already failing to keep it working.
Hearing aids development requires ASIC chip development, low power, analog and digital all in one…. this all adds up to being extremely expensive, requiring a very broad range of expertise to get right.
Yeah. A former boss of mine just lost one. Paid more than $800 but he wouldn’t say how much. Everything’s custom or it hurts/falls out.
“Dextra is an advanced robotic hand, with 4 independently actuated fingers and a thumb with an additional degree of freedom.”
I’m all for improving what evolution gave us. Human hands don’t even have [fully] independently actuated fingers.
As a system of encoding, the hands are really brilliant.
What I am looking for is a way for people who still have their hands but are unable to use them to utilise this technology. Same premise but as a glove. I assume this isn’t the main focus due to tolerances of the human body and the way the fingers move?
Fascinating, very nice sharing.