As difficult as it is for a human to learn ambidexterity, it’s quite easy to program into a humanoid robot. After all, a robot doesn’t need to overcome years of muscle memory. Giving a one-handed robot ambidexterity, however, takes some more creativity. [Kelvin Gonzales Amador] managed to do this with his ambidextrous robot hand, capable of signing in either left- or right-handed American Sign Language (ASL).
The essential ingredient is a separate servo motor for each joint in the hand, which allows each joint to bend equally well backward and forward. Nothing physically marks one side as the palm or the back of the hand. To change between left and right-handedness, a servo in the wrist simply turns the hand 180 degrees, the fingers flex in the other direction, and the transformation is complete. [Kelvin] demonstrates this in the video below by having the hand sign out the full ASL alphabet in both the right and left-handed configurations.
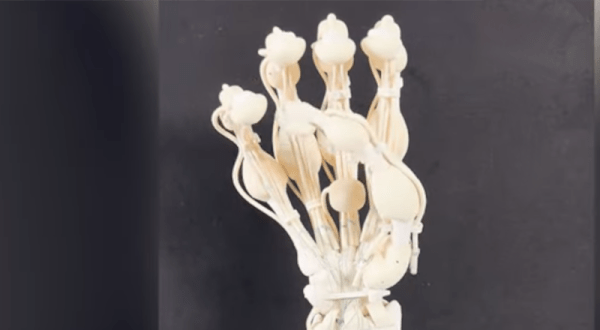
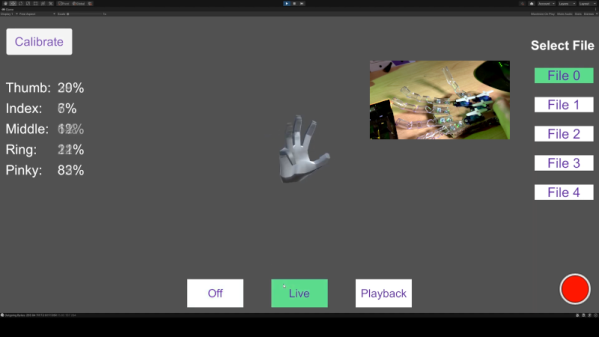
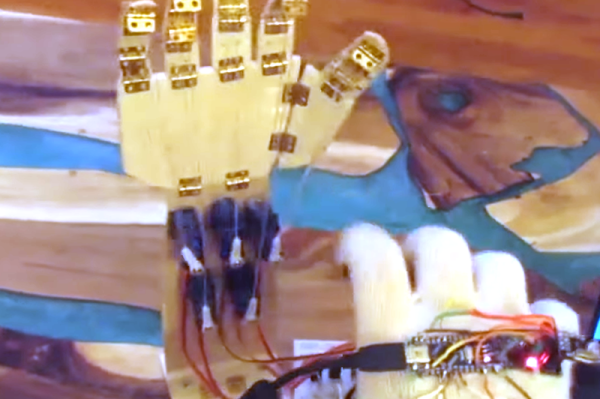
The tradeoff of a fully direct drive is that this takes 23 servo motors in the hand itself, plus a much larger servo for the wrist joint. Twenty small servo motors articulate the fingers, and three larger servos control joints within the hand. An Arduino Mega controls the hand with the aid of two PCA9685 PWM drivers. The physical hand itself is made out of 3D-printed PLA and nylon, painted gold for a more striking appearance.
This isn’t the first language-signing robot hand we’ve seen, though it does forgo the second hand. To make this perhaps one of the least efficient machine-to-machine communication protocols, you could also equip it with a sign language translation glove.