
Three things that I love about participating in Maker Faires are seeing all the awesome stuff people have done over the past year, spending time with all my maker friends in one big room over two days and the reactions to what I made. The 2016 Ottawa Maker Faire had all this in spades.
BB-8 – Droid With Magnetic Personality


There’s just something about BB-8 that touches people. I once heard of a study that showed that when buying kid’s toys, adults were attracted to circles, that that’s the reason teddy bears often have round heads with big round eyes. Similar reactions seem to happen with BB-8, the droid from last year’s Star Wars movie. Adults and kids alike pet him, talk baby-talk to him, and call to him with delight in their voice. I got those reactions all throughout the Maker Faire.
But my favorite reaction happened every time I removed the head and lifted the top hemisphere of the ball to expose the electronics inside. Without fail the reaction of adults was one of surprise. I don’t know if it was because of the complexity of the mechanism that was revealed or because it was just more than they expected. To those whom I thought would understand, I gave the same speech:
“This is the remote control receiver taken from a toy truck, which puts out negative and positive voltages for the different directions. That goes to this ugly hack of a board I came up with that converts it all to positive voltages for the Arduino. The Arduino then does pulse width modulation to these H-bridge driver boards, for speed control, which then talk to these two drill motors.”

Those I wasn’t sure would understand were given a simpler overview. Mine’s a hamster drive (we previously covered all the possible ways to drive a BB-8) and so I showed how it sits on two Rollerblade wheels inside the ball. I then flipped it over to show the heavy drill batteries underneath, and then explained how the magnets at the top of the drive mechanism attracted the magnets under the head, which got another look of revelation. All went away satisfied.
But BB-8 sometimes needs a break from human interaction and seeks out its own kind, like Bowie which you can read about below along with more awesome Maker Faire exhibits.
Bowie – Shoreline Cleaning Robot


Bowie is the creation of RobotMissions.org, the brainchild of [Erin], aka RobotGrrl. Its mission in life is to clean up garbage from shorelines. RobotMissions has been at it for almost a year now, has done multiple field tests and collected just over $10,000 from a kickstarter campaign. Currently Bowie is remote-controlled but there’s a mounting spot for a camera for vision and other sensors for eventual semi-autonomous operation. It’s 3D printed and the files are online for anyone else to experiment with. We’re also delighted that RobotMissions is entered in this year’s Hackaday prize.
SONIA – Autonomous Underwater Vehicle


And while on the topic of autonomy in vehicles, located at a nearby booth was S.O.N.I.A., an underwater autonomous vehicle built by undergraduate students. It’s undergone 8 prototypes since 1999, competing in the annual Robosub competition in San Diego. With a maximum depth of 30 meters, it’s capable of 70 minutes of autonomy, mapping and navigating its environment using sonar and cameras.
And if you look closely at the base of the vehicle in the photos above you’ll notice some red torpedoes. Those are fired using compressed air from a part that wasn’t attached during the Faire, so we’re not sure if they are used in the competitions. But we think they’re a must-have anyway.
Carleton CanSat
Two teams from Carleton University are competing in the CanSat competition which involves a payload being rocketed to 700 meters where a cylinder (the ‘can’ in CanSat) containing their project is released. It floats by parachute down to 400 meters where their project is deployed. Their project then has to glide down the rest of the way in a circular pattern with a diameter less than 1000 meters. On the way down they have to sample and transmit back air pressure, temperature, and using a magnetometer and a pitot tube, the heading and speed. The teams made all the necessary electronics boards from scratch.


One team’s implementation is a winged glider with the electronics located between the wings. The other team uses helicopter style blades that autorotate using the air flowing up through the blades as it falls, slowing the descent. But this would cause everything below the blades to counterrotate and interfere with some of the sensors. To prevent that they added a motor lower down that counterrotates everything relative to the blades.
Merge Conflict Team 2706 – Robot Warriors


Merge Conflict is a community organization made up of 25 high school and grade 8 students and industry mentors who build a robot within 6 weeks to compete in the FIRST Robotics Competition. FIRST is an international organization founded by Dean Kamon of Segway fame. In the competition the robots compete in a challenging field game.
2016’s game was called FIRST Stronghold and involved breaching castle defenses (overcome obstacles), throwing rocks (balls) into castles, blocking other robots, and even scaling the castle wherein robots actually lift themselves to a specific height up castle’s wall. For the first fifteen seconds the robots are autonomous and are teleoperated for the remaining two minutes and fifteen seconds.
Merge Conflict’s robot was one that breaches castle defenses, sometimes practically flying over them as you can see in the video below (21 seconds in), and throws balls into the castles. It could accomplish all that autonomously around 85% of the time, an impressive achievement.
Chipsetter – Affordable Pick And Place Machine
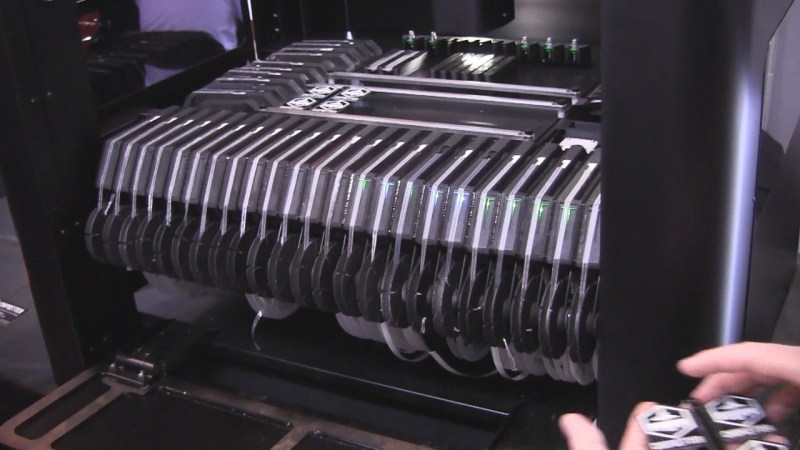
Chipsetter is a pick and place machine designed and priced for hackerspaces, design labs and engineering departments. [Brian Benchoff] covered it recently while they were at the New York Maker Faire and this was my turn to see it in action.
I watched a demonstration of the full process where at one table they first applied paste to their boards using a template that was purchased from the same fabricator that made the boards. They positioned the boards in the Chipsetter machine and it picked LEDs and resistors from feeders and placed them precisely on the paste on the boards. Since the machine relies on vision to line up with the boards, a cover a was lowered during the process that not only blocked most incoming light but also prevented filming while it was running (in hindsight, I could have left the camera inside the machine itself). After that the board was returned to the other table for reflow and soldering on of a battery clip.
To be honest, this is my only experience with a pick and place machine but we have a number of people in town who regularly make electronic badges for events and other wearable electronics in large quantities who would benefit from one of our hackerspaces having one of these.
R2D2 Builders Club


And before the Faire ended, my BB-8 couldn’t resist visiting the R2-D2 droids built by members of the R2-D2 Builders Club. Club members were out in force with three R2 units, a completed static BB-8 with a drawer panel that opens, and a BB-8 still in progress. If you’re looking to build one of these R2 units, or other astromech droids, then there’s no better place to start than at Astromech.net where you’ll find blueprints, details on electronics and a helpful forum.
Til Next Year
And so ended the Faire. BB-8 and I packed up our table and rolled on out until next year.














I don’t get the Chipsetter’s claim to having “low-cost feeders.” At MSRP, they’re $100 each for 8 mm feeders, which are the ones you’d likely need the most of. That’s not significantly cheaper than any other “pro” manufacturer.
If they would be able to make the feeders *very* affordable (say, $20/each, maybe only in large quantities, say 50 or so) then that’d really make the machine attractive to a lot of places. Then you could survive with only having a few slots for feeders on the machine so long as switching is fast.
Just an incomplete thought on the auto rotating can sat.
The article mentions that they need a motor to rotate the electronics counter to the blades to maintain orientation. The photo appears to show the device to have 4 blades. Would a possible alternative be to have the 2 sets of blades counter rotate the orientation could be changed by applying drag to either of the blade sets.
The deployment of the glider from the can was quiet neat and well done.
Interesting idea. So if I understand you right you’re saying to mount the blades with air foils such that the upward moving air (relatively to the sat) would turn two of them one way and two the other way. I wonder if the air passing through the lower set of blades would be affected so much that they wouldn’t rotate the upper set sufficiently. Maybe some compensation would be required? Might be worth some experimenting.
Thanks for this great write up about Team 2706! I’m one of the adult mentors who cofounded the team and was there for most of the weekend at Maker Faire, but didn’t get a chance to wander around as much as I’d have liked. We were right across from the R2-D2’s but I didn’t get to see your BB-8 in person!
Just a minor update, we actually just changed the name of our team from Merge Conflict to Merge Robotics. While “merge conflicts” are very familiar to those who develop software collaboratively, it felt a bit too much like an inside joke for most. The word “merge” is an apt descriptor for our team as we combine the multiple skills, disciplines and design ideas from students across a dozen west-end high schools and volunteer mentors from multiple industries!