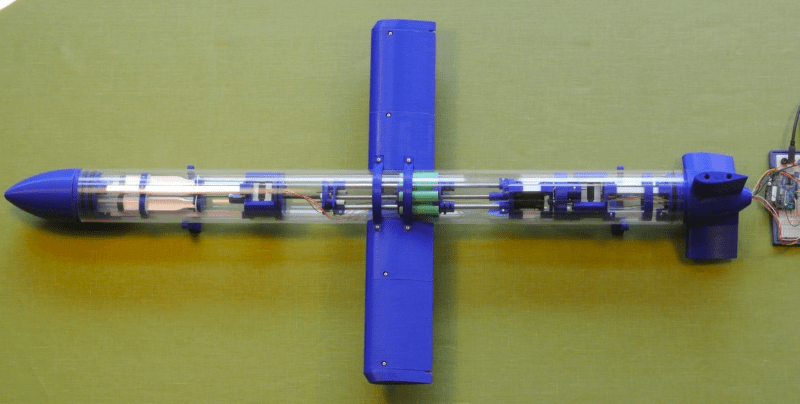
[Alex Williams] created his Open Source Underwater Glider project as an entry to The Hackaday Prize, and now it’s one of our twenty finalists. This sweet drone uses motor-actuated syringes to serve as a ballast tank, which helps the glider move forward without the use of traditional propellers.
Unlike most UAVs, which use motors to actively move the craft around, [Alex]’s glider uses the syringes to change the buoyancy of the craft, and it simply glides around on its wings. When the craft starts getting too deep, the syringes push out the water and the glider rises toward the surface until it’s ready for another glide.
This low-power solution allows for long-term science projects and research. In addition to conserving power, the glider’s slow travel does not disturb the water or sea life.
[Alex]’s goal is to make his glider open source and 3D printable, combined with off-the-shelf hardware and ArduSub under the hood.

















http://i.imgur.com/AOL6QLK.gif
Am I correct in assuming that the “mass” is 18650 cells? So this thing can change it’s buoyancy, center of mass, and left/right mass balance? That’s really amazing. I’d love to see some video of it operational
Syringe body is inside the sub with a port to outside water. Water on one side of the plunger, air from inside the sub on the other. Pulling water in adds weight and compresses the air inside the sub which stays the same weight. Calibrate by adding weights till the sub is at neutral buoyancy when syringe is in center position.
Center of mass moved forward tilts nose down while diving to give forward motion. Tilt nose up while rising for forward motion. Can go backwards some if needed. Side to side shift of center of mass will tilt left/right and shift lift from wings off-center to create a slow turn to either side without ANY wing motion. Calibrating mass to level, stopped, is tricky.
Will scale up easily. This individual has done really well! Has skills!
I don’t think those are cells, they look too perfectly uniform, possibly sleeved lead weights? Also no wires seem to stop at them, the ones nearby go up to the motors.
I would love to see this as the basis of an air glider. Add a camera and just let it go.
Been done! Doubt I can find it quickly, but there is a youtube vid of just that. Dry cleaning bags making a long torpedo, clear on top, flat black on bottom, blow it up, sun heats air inside for lift! Tiny wings servo controlled. Battery, motor, prop. Looks like a torpedo in flight and quite impressive.
Circular silver reflective space blanket on bottom and paint other side black, thin clear plastic top. One weight in bottom of center. Inflate and set in sun.
That does sound nice though.
I was thinking more of a hang glider than a mini-Zeppelin. As in, having the water wings switch out for cable attachments to the hang glider.
How do you plan to achieve neutral buoyancy in the atmosphere without something zeppelin like?
Super pressure balloon, once it reaches a certain air density (atmospheric pressure) it will not rise any further unless the air around it becomes more dense.
Don’t need neutral buoyancy. In fact, it would be bad to have it. What I was more or less suggesting is the use of the shifting weights as a form of control in the same manner as done by human hang glider operators.
More like a wing’d blimp. It would be a fun project.
Some solar cells would be pretty cool too. Run out of power? Just float on the surface until it’s charged up again. Also maybe that could supplement enough energy to run a wireless camera part time.
That would be a good add. Just put it in the wings and no real change in buoyancy or weight would occur. It would power itself for a very long time.
I’m curious as to communications. I know submarines have to go crazy low on the EM spectrum to get the signal to penetrate any significant measure of water.
I suppose that doesn’t matter that much if it’s autonomous, but I would think it prudent to include at least some sort of basic “I’m still here” functionality, at least.
There was an earlier article, believe here on HAD, of a similar but much larger vehicle. It communicated through the worldwide cell phone system using the iridium satellite network (expen$ive but avail to public). Comes to surface, gets gps location, phones home location in text message. Oceanic wandering aimlessly. That hacker was working on two-way communications as the next step, for reporting in and accepting commands.
Interesting satellite network, Iridium. Low orbit and naked eye visible on clear nights, large gold reflector for the antenna, Heavens Above website will give you predictions for when, where, and time the sun catches the antenna and creates an Iridium Flare visible at your location. When saw my first flare hadn’t been aware of this sat network, honest, though I saw the enterprise warping out! Doesn’t make a hobby, but is a sight you should try and catch.
For this type of vehicle, the common approach is having the vehicle popping up at surface periodically to update its position and communicate it home. Eventually will also get new waypoints to track if its using two-way communications. For this simple vehicle I would try to add a simple spot tracker (https://www.findmespot.com/en/index.php?cid=128).
Since it will be diving and surfacing the whole time a propellor on the back to harvest energy from the diving and surfacing might also be a good way to keep things charged up. Long deep dives will and long assents will give the impeller plenty of time to spin up and generate power…
Maybe a solar panel or two inside to provide some supplemental power for a radio since it’ll probably needs to surface to communicate…
You’ll never get back more energy than you use compressing the air in the tanks to dive….
Fair, but to get back any is more than you had before…
Just using the forward energy a different way, is a trade-off of speed for battery charging, problem of prop speed will be real slow, perhaps gearbox needed. So which is less efficient? Prop slowing it down to charge batts, or resting stopped on surface for solar cells to charge? Both are workable. Prop has potential leak. Solar cells degrade in salt water but can be inside clear body, but performance degraded by bobbing around on surface waves, and then there are clouds that can last days during a storm plus anything on the surface is blown off course by winds, and currents are a problem for both methods. Prop generator has no need to come to surface at all other than to phone home. Nice set of alternatives and challenges!
Rather than using motors, I wonder if this can be done with a small scale vehicle released in the ocean:
http://orbitalvector.com/Aquatic/Underwater%20Gliders/UNDERWATER%20GLIDERS.htm
These craft take advantage of thermal stratification, the phenomenon of the water being warmer at the surface than at deeper depths. The glider’s engine contains wax tubes that are warmed at the surface. This causes them to expand and push oil from an internal reservoir to an external bladder, forcing a change in buoyancy and helping the glider dive. At lower depths, where the water is colder, the wax compresses and the oil is drawn back into the internal reservoir, causing the glider to rise toward the surface. These slow dives and climbs allow the glider to very gradually move through the water independently of whatever current it may be following.
At the surface portions of its cycle, one of the glider’s wings, each fitted with an antenna, is canted up fully out of the water to transmit data and to receive navigational and GPS signals.
How deep a glider can dive depends on the model, but ranges between 200 and 1500 meters. However, deep-diving gliders are under development which will be able to achieve depths down to 3300 meters.
The craft uses arrays of onboard batteries to control its pitch and orientation, as well as to power its sensors and radios. When the idea of an underwater glider was first being bandied about in the 1980s, it was thought that thermal differentials in the water could help recharge the batteries, allowing the gliders to potentially remain at sea indefinitely. Unfortunately, no one has yet developed this capability, though research is ongoing.
I don’t see why a propeller can’t be mounted on the back end to generate current. Sailboat uses generators as such on ocean voyages.
An old article, but relevant:
http://www.whoi.edu/oceanus/feature/green-energy-powers-undersea-glider
Going with the current it will only need to maintain neutral buoyancy to glide.
Here is your solution for Satellite coms
http://www.rock7mobile.com/products-rockblock-9603
Cheap to buy, cheap to run, and easy to implement.
No matter what it’s gonna need a failsafe mode. Something at end of charge that blows ballast, rises to surface, and catches sun to recharge.
Wind blown surface currents are a problem that put you way off course fast. Makes a great case for for the propeller driven generator as can stay at depth, but now you’re locked into those currents.
Hey. All of this can be done in the atmospere as well! Hey, just planting ideas… sorry some are just fungi.
sounds like a shallowwater copy in principle & mechanics of the Webb Research/Teledyne gliders that they have been using for years. nothing new.