
Sony recently unveiled Toio, an educational robotics toy for young programmers. We all know Sony as an electronics giant, but they do dabble in robotics from time to time. The AIBO dog family is probably their most famous creation, though there is also QRIO, a bipedal humanoid, and on the stranger side, the Rolly.
Toio consists of two small cube robots which roll around the desktop. You can control them with handheld rings, or run programs on them. The robots are charged by a base station, which also has a cartridge slot. Sony is marketing this as an ecosystem that can be expanded by buying packs which consist of accessories and a software cartridge. It looks like the cartridge is yet another proprietary memory card format. Is Sony ever going to learn?
There isn’t much hard information on Toio yet. We know it will be released in Japan on December 1st and will cost around ¥ 20,000, or about 200 USD. No word yet on a worldwide release.
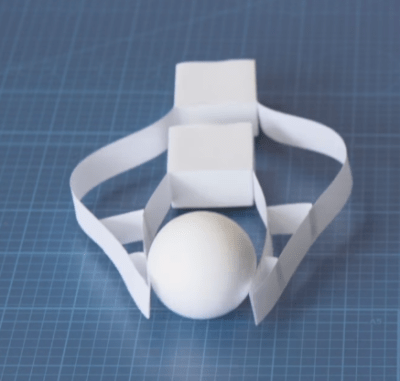
The striking thing about this kit is how well the two robots know each other’s position. Tape a paper pair of pants, and they “walk” like two feet. Attach a paper linkage between them, and they turn in perfect sync, like two gears. Add some paper strips, and the two robots work together to form a gripper. We can only guess that Sony is using cameras on the bottom of each robot to determine position — possibly with the aid of an encoded work surface — similar to Anoto paper. Whatever technology it is, here’s to hoping Sony puts out an SDK for researchers and hackers to get in on the fun with these little robots.














wow, moving brick!
i’m completely unimpressed
You must be old.
The eyeball is straight out of Super Mario 64
I really wanted a Qrio, still waiting for a replacement
I haven’t wanted a toy so much since Lego bought out the first Mindstorms kit… I absolutely love this!
Thoughts;
– Definitely optical tracking, I guess some uniquely encoded fiducials? From the synchronisation, there has to be some concept of an absolute XY co-ordinate system, and I can’t see where else such data could come from…
– Probably some IR emitter/receiver pairs on each side? That would also lend the possibility of one bot being able to calculate its own position from the others, if each side LED can transmit the bot’s own position, with an extra two bits to identify which side is in view
– The IR emitter/receiver combo explains the Eyeball demo quite nicely actually…
No thanks, this is of little or no educational value to my children in terms of learning mechatronics. If they can’t make it, break it, and rebuild it all they have learned is how to spend money, or convince other people to do so, on yet another plastic toy.
I feel the same way. Sorry Sony, not very educational.
I’m pretty sure Sony will find some way to screw it up horribly… but it’s a nice thingie.
They already screwed it up with the cartridge slot. Come on Sony, we’re not in the 1980s.
Those demos are extremely amusing but it does seem like a toy. If you meant for education I imagine there will be an SDK released. Arduino IDE integration? I know there won’t be but there should be …
This has got “just found it at the local Goodwill store for $2” in a few years written all over it!
That’s how I get all my tech!
It’s amazing how much tech can be found for under 10$
You and I would get along quite well! ????
The part where it spins with the bar on its back to keep the dots visually stationary was highly impressive. Extremely low margin of error and high movement speeds from such tiny motors. I too am very curious what sort of position racking system they’re using—at first I assumed it was all relevant to the base station but accuracy would decrease and jitter would increase as they moved away, which never appeared to happen. Naturally this is an edited video but still. I almost wonder if it’s simply a pair of optical mice-style inputs on the bottom? That would allow for high speed high precision tracking. But that’s relative not absolute, is prone to drift, and doesn’t explain the bot-to-bot tracking…
Maybe IR and a proper camera at the bottom like Tom said?
I think IR, if used, would just be for communication between them. Eddy seems to have hit the nail on the head with the positioning system, but I’m starting to wonder if the tiny bots are using on-board processing or not…
On-board would be impressive, if that were the case, I would buy them not to use them, but for their processing power.
That’s what I was referring to with the Anoto paper mention in the article. This has me wondering how hard it would be to make a diy version… now where did I put my old livescribe pens
Position tracking is using the non repetitive grid on the green paper . I’ve seen that in another project but just can’t remember the name of that type of grid.
I’ve grasped some more Information from the Japanese Engadget youtube video.
https://www.youtube.com/watch?v=lLth1Uj4ymo
It’s a interactive toy, and not teaching programming. They hope the kid’s use the cube as a motion platform, and build creative way to use the motions.
The cubes have IR transceivers to “look” or scan for other cubes. They also get absolute position through printed patterns, similar to the tiptoi pen’s. By knowing the absolute position, it prevents escaping from the playground. The position tracker is also used for mode selection, by placing it on a sheet of paper with the instruction pattern. The final production package contains a foldable playground with the position pattern. The Sony guy also say’s, the pattern can also printed with a ordinal printer.
Also, but it’s my assumption, the basestation provides the required computing power to control the cube’s via radio. It would be really interesting to know whether Sony plans to publish a SDK. But, if it is radio controlled, it should be possible to take over the control over the cube and make a own basestation ;P
I think it could be related to that project from disney reserach lab calles lumitrack : https://www.disneyresearch.com/publication/lumitrack-high-speed-high-precision-low-cost-tracking-with-projected-m-sequences/
print 2 m-sequences perpendicular to one another and with a camera you have absolute position traking.
Interesting paper, thank you for the link!
Anyone know if there’s a teardown of one of these on-line anywhere? I’d like to see the drive mechanism.
The IR Emitter/Receiver beautifully explains the Eyeball Demo.