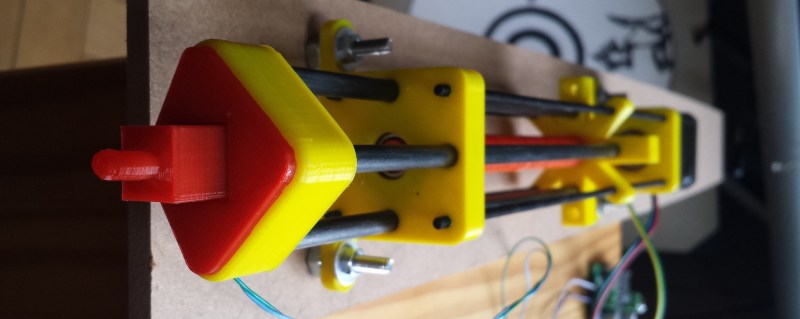
The rabbit hole of features and clever hacks in [chiprobot]’s NEMA17 3D Printed Linear Actuator is pretty deep. Not only can it lift 2kg+ of mass easily, it is mostly 3D printed, and uses commonplace hardware like a NEMA 17 stepper motor and a RAMPS board for motion control.
The main 3D printed leadscrew uses a plug-and-socket design so that the assembly can be extended easily to any length desired without needing to print the leadscrew as a single piece. The tip of the actuator even integrates a force sensor made from conductive foam, which changes resistance as it is compressed, allowing the actuator some degree of feedback. The force sensor is made from a 3M foam earplug which has been saturated with a conductive ink. [chiprobot] doesn’t go into many details about his specific method, but using conductive foam as a force sensor is a fairly well-known and effective hack. To top it all off, [chiprobot] added a web GUI served over WiFi with an ESP32. Watch the whole thing in action in the video embedded below.
https://www.youtube.com/watch?v=G30edgY6RIA
[chiprobot] is no stranger to DIY linear actuators, you can see his gearmotor version and stepper version on Thingiverse. He’s certainly stepped it up in terms of power and size with this Hackaday Prize Entry.

















I have a lot of questions about this. Threaded rod is easily available and is even used in this project. Why not have a captive nut and a drive rod from a hardware store? This would decrease complexity and increase the accuracy and strength of the system. Is this a “to prove I can” project?
I presume that’s what he is doing, as this device otherwise looks like it could be made with a saw and drill press. Pushing the envelope for strength and smooth operation of 3D printed parts is a valid goal on its own.
In addition to this, the thread pitch means this can actuate faster with fewer turns of the motor
Also, the choice of bearings. Skate bearings are not thrust bearings, everyone!
Correct, however these skate bearings should not have a problem handling a 2kg axial load (sorry can’t back that up with facts – just lost 10min navigating the skf web site and couldn’t find the numbers)
It’s a shame you felt like you needed to look up specs. I’ve skateboarded for decades and have used the most expensive bearings as well as the cheapest. Even the cheapest handle well over 2kg of axial load. I’d guess they handle a great deal more as well, since the forces they experience when, say, pumping in the transitions of a half-pipe are probably triple my own weight of 65kg. Over and over and over again. Then there are the forces experienced from landing hard on them from various heights, over and over again.
In other words, yeah, 2kg is nothing for even the cheapest 608 bearings. Anyone calling you out on lack of specs is just being the typical pedantic HaD cynic.
nice concept. would love to see a durability test though. i know 3d printed gears can last quite a while.
I’d need considerable convincing that printed leadscrews are practical when ACME rod is cheap as dirt.
If you use ACME rod, your actuator won’t be particularly linear…
And a 3d printed screw is better?
Hmmmm, good point.
Probably for the first week? It’ll presumably deteriorate much faster than metal.
depends on the specific plastic and use case, in some uses plastic gears will outlast metal ones, the extra give can be the difference between a broken tooth and no damage at all.
Pololu, not RAMPS, stepper drivers. ‘Course those drivers could be Pololu *compatible* from some other vendor.
Kind of reminds me of my project:
http://roboticravings.blogspot.se/2017/01/opensea-mechanics-update.html
NA
Another crappy had.io page with no files, no STLs, no coherent description of the project. Another project that cannot be reproduced by others. Bleh.
https://www.thingiverse.com/thing:2302223
Yet again, other pages do much better than io… Thanks for the link. Thingiverse is awesome, had.io… not.
Gareth’s conductive ink/foam technique was actually pretty well documented at the old LMR but alas, that content is no more. He also made some great FSRs with his laminator and the anti static foam that ICs are often shipped in. The videos are probably still on YouTube if you’re very interested in experimenting or following.
https://web.archive.org/web/20150910022853/http://letsmakerobots.com/node/40683