One way to design an underwater monitoring device is to take inspiration from nature and emulate an underwater creature. [Michael Barton-Sweeney] is making devices in the shape of, and functioning somewhat like, clams for his open source underwater distributed sensor network.
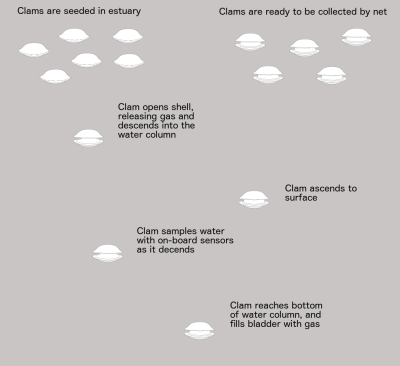 The clams contain the electronics, sensors, and means of descending and ascending within their shells. A bunch of them are dropped overboard on the surface. Their shells open, allowing the gas within to escape and they sink. As they descend they sample the water. When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re collected in a net.
The clams contain the electronics, sensors, and means of descending and ascending within their shells. A bunch of them are dropped overboard on the surface. Their shells open, allowing the gas within to escape and they sink. As they descend they sample the water. When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re collected in a net.
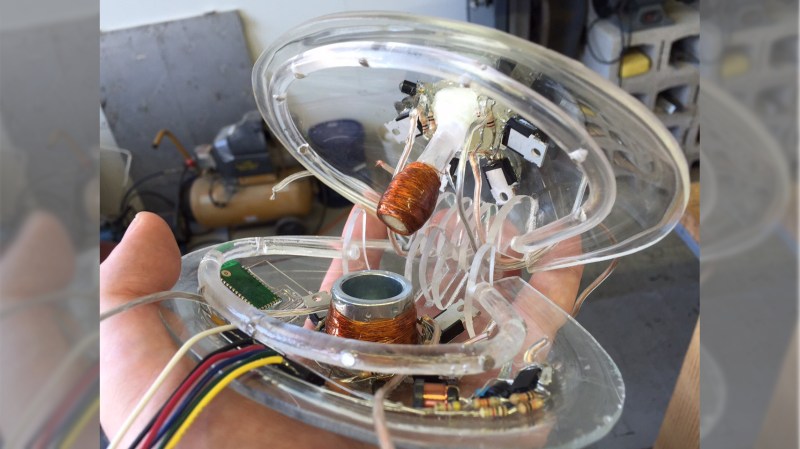
Thus far he’s made a few clams using acrylic for the shells which he’s blown himself. He soldered the electronics together free-form and gave them a conformal coating of epoxy. He’s also used a thermistor as a stand-in for other sensors and is already working on a saturometer, used for measuring the total dissolved gas (TDG) in the water. Knowing the TDG is useful for understanding and mitigating supersaturation of water which can lead to fish kills.
He’s also given a lot of thought into the materials used since some clams may not make it back up and would have to degrade or be benign where they rest. For example, he’s been using a lithium battery for now but would like to use copper on one shell and zinc on another to make a salt water battery, if he can make it produce enough power. He’s also considering using 3D printing since PLA is biodegradable. However, straight PLA could be subject to fouling by underwater organisms and would require cleaning, which would be time-consuming. PLA becomes soft when heated in a dishwasher and so he’s been looking into a PLA and calcium carbonate filament instead.
Check out his hackaday.io page where he talks about all these and more issues and feel free to make any suggestions.

















Copper seems like a bad idea as it’s very toxic to reefs. I’ve heard stories where a kid puts a penny in a reef tank and kills most of it.
Hi Steve, I think copper traces are a necessary evil for electronics. A goal of the project is to switch to a soft robotic actuator, instead using a solenoid for the adductor. That could eliminate the copper magnet wire, and mitigate the situation.
I think he may be referring to electrodes for a salt water battery. Besides, that will corrode so fast in the sea its not funny
Hi Erik, it’s my understanding of salt water batteries that the zinc electrode is sacrificial and the copper electrode does not give off copper. I think it’s similar to people putting zinc anodes on their boats to stop other metals on their boats from corroding.
>>He’s also used a thermistor as a stand-in for other sensors
I assume he means for this as a stand in for a temperature probe as without temperature data all you’ll have is a partial pressure or mg/L with no way to tell what the saturation value is for the water body.
The aim of the project and the functionality of the sensors seem to be at odds. The shape of the clams could prevent an accurate 3D profile of the water body if multiple clams drift towards each other on their descent. [Michael] states this is targeted towards NGOs and individuals for monitoring water bodies but the instruments only gather a single snapshot of the water. Whether you’re releasing a bed of clams or dropping a Niskin rosette, labor gets expensive (unless you’re using undergrad / grad labor), doubly so if it’s a region with limited infrastructure.
A few semi-permanent moorings across a water body will achieve the same or better results with fewer man-hours spent collecting data. You could even hook up a sat-phone or packet radio to beam the data back to your lab/house
I work for a non-profit that has an array of stations doing water quality measurements. We have moorings mounted to pilings up and down a lagoon where YSI’s and other devices measure the water round the clock and it is all sent to our server via cell network where it is accessible to the public and government agencies. We try to get around the labor issue by having these systems well automated with 45-60 days endurance before calibration is needed or consumables are depleted. http://api.kilroydata.org/public/
I took it to mean that he’s using a thermistor for now and will work on other sensors later.
Yes but I’m confused as to what a thermistor is suposed to stand in for if not a temperature probe. It’ll do a fine job at that with a decent calibration.
Yes, that’s exactly correct. I am using a thermistor and only measuring temperature right now. I would like to add a full suite of sensors, but I am focusing on the platform.
Hi Leithoa, the purpose of the project is to gather as much water quality data as possible. It is not to gather data permanently from one body of water, but to have a method for easily gathering data from many different bodies of water. The goal is to have volunteers from NGOs disperse the clams across a body of water by boat, and then, in an hour or so, recover the clams by net. It is limited to protected waters that do not have strong currents (or are used during slack water), so drift should not be a problem.
>>The goal is to have volunteers from NGOs disperse the clams across a body of water by boat, and then, in an hour or so, recover the clams by net.
To what end though. Conditions can fluctuate quite rapidly depending on the weather or time of season. Is this effort any more valuable than a grab sample from the middle of the lake and profile in the deepest part? A lake that looks healthy in the spring could be experiencing die offs come late summer. Are there specific questions you’re trying to answer or just collect a large amount of data?
>>It is limited to protected waters that do not have strong currents (or are used during slack water), so drift should not be a problem.
I hope you test these in a pool. Weight balance or even how they’re placed in the water will drastically affect the way they descend, you’ve made a circular wing, expect them to behave as such. Even a flat disc will behave like this, just try to get a coin into a shot glass at the bottom of a large bucket full of water. A cylindrical body can accomplish the same sink and float behavior while mitigating most chances for significant drift and possibly making it easier to build.
> Are there specific questions you’re trying to answer or just collect a large amount of data?
Both. If the clams were equipped with fluorescent sensors for oil, the oil could be tracked and the source could be determined. Other sensors can be used for other specific problems, but there is also the overarching goal of developing a comprehensive baseline of data for all bodies of water.
> I hope you test these in a pool … just try to get a coin into a shot glass …
I have been using an aquarium for these. I have dropped many natural clams into water and they have descended roughly straight down. The goal is not to get a coin into a shot glass. That level of resolution is not necessary for this project’s goals. If these clams deviate several feet or yards in either direction, that will not be a problem, because they will most likely be spaced hundreds of feet away from each other (or more). I intend to put a GPS module into them, so that there location can be tracked when they are on the surface, and an estimate of their underwater location can be made for the data.
I agree it would have to be a small amount of copper. Copper is used in reef tanks in the form of Malachite Green to cure ick. So a small amount is not too dangerous but I would think twice about upsetting a stable ecosystem. However, the project itself looks great, can’t wait to see more!
Yeah, I don’t want these things to be causing problems, just collecting data on problems. Thanks for the feedback!
“When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re From the article: collected in a net.”
Where does this gas come from?? Did it get transported in a pressurized bottle inside the clam?
I meant:
From the article: “When they reach the bottom, gas fills a bladder and they ascend back to the surface with their data where they’re collected in a net.”
Where does this gas come from?? Did it get transported in a pressurized bottle inside the clam?
electricity + water = gas
Backing Soda + Water = gas
Yeah, I used vinegar (acetic acid) and baking soda (sodium bicarbonate), but I am considering using hydrogen peroxide and catalase.
Hydrogen peroxide is unstable in presence of heat and/or light and/or time. I would advise against it.
PLA is by no means biodegradable in typical underwater conditions. It’s only compostable in industrial composting conditions. PLA will not even readily degrade due to UV radiation. Make no mistake, PLA is a durable polymer.
There are polymers out there that are degradable under water such as PHAs but I’m not sure these would be available as filament. They tend to have a pretty low elastic modulus but companies such as Kaneka might have a polymer grade that could fit the application. There are compounders that also make grades with calcium carbonate for better stiffness, but again, you’d need someone to make filaments out of those first.
Hi Ciplionej, yes, PLA does not biodegrade easily underwater (or underground), but I believe that it is the best of the alternatives. It can rapidly biodegrade under certain circumstances, it is naturally derived, and it is also very durable.
The goal would be to use PLA and Calcium Carbonate filament and reduce the amount of PLA as much as possible, so if one of these sensor platforms was lost, it’s impact on the environment would be similar to any other natural shell.
What about fish/sharks and others, eating the ‘clams’ ???
if you touch a piece of coral in a reef,
a organism dies, this causes it to secrete a chemical that leads to a chain reaction,
as a deep sea diver I used to educate ppl on this
Sooner or later the reef is dead,
I really hope these aren’t being released in open water to add to all the plastic waste people are trying to clean up.
Right now, they are intended to be dispersed in a bay or estuary for a short period of time, and then be collected. I would like to add a beacon, so that collection is easier, but I’m also trying to design them, so they don’t pollute if they are lost.
How are these a distributed network (as per the title)? There just sensors. I was looking forward to a cool technique for a mesh network that can communicate underwater.
Right now, there is no underwater communication, but that is a goal of the project. It is not a priority until they’ve been proven to operate in salt water for long periods of time. At that point, the deployment will change to have them drop out of the water column and stay underwater long term (i.e., become benthic like adult clams).
i was looking for the same information, what wavelength and modulation is to be used, and what bandwidth is to be expected ..
I sympathize with both of you. I ruled out spending time on underwater communication until the project reached the next level. I believe that it would be too difficult for me to make anything reliable, it would drain a lot of time and was unnecessary to gather water quality data. There are a lot of complications with communicating underwater (reflections, different densities, et cetera), and I do not want to do this haphazardly and produce a lot of sound pollution (it’s unlikely it would deafen any sea creatures, but it just seems tasteless to blunder into it as a novice). Having said that, it would be a fantastic capability. It could extend GPS underwater by triangulating from clams on the surface. Many of the problems with ultrasonic underwater communication are similar to what hams do all the time, so if you have any suggestions, I would be grateful to hear them. The only thing I can offer right now is the WUWNet mailing list, which has a lot of information on underwater communication and a community of academics working on the problem.
I’m not sure how well a bladder filled by a chemical reaction will work for creating buoyancy at high diving depths. Here are a two problems which may occur:
1. Chemical reactions can be affected (slowed down) by the high pressure. This is especially the case for reactions creating gas since emitting gas against the ambient pressure will require a certain amount of energy. This energy must come from something (the chemical reaction) and may drastically slow down the reaction / shift the chemical equilibrium towards the non-gaseous state.
2. The amount of gas required to create buoyancy will strongly depend on the diving depth. Outputting 1 mole of gas directly below surface (still at normal atmospheric pressure) will fill up a volume of 22.4 liters and therefore create ~224N of buoyancy. Creating the same amount (1 mole) of gas at a depth of 1000m will only fill up 0.22 liters and therefore create a buoyancy of only 2.2N (100 times less than that the same amount of gas would generate near surface). The expanding gas volume during the ascent also means that it will probably require a way to release excess gas during the ascent.
It may still work well enough for moderate diving depths – but higher diving depths will probably require another solution. One option would be just dropping a (non-toxic) ballast after reaching the intended diving depth. One option for that is to hold a piece of iron by an electromagnet (and turn off the magnet to drop it). This solution has a built-in failsafe mechanism since the ballast is automatically dropped in case of a power failure.
Hi Jakob,
Thanks! I hadn’t considered that yet. I think for now, I will just focus on moderate diving depths. The average depth of Chesapeake Bay is 21 ft, Buzzards Bay is 36 ft, and San Francisco Bay is 43 ft, so I am hoping that this method will work for them. To get to deep depths (like 1000m, as you mentioned), we would probably want a different sensor platform. Using ballast, like you suggested, is a really good idea. Thank you again for your feedback. I am going to make sure that I include an analysis of the chemical reaction at different depths.