While quadcopters seem to attract all the attention of the moment, spare some love for the rotary-wing aircraft that started it all: the helicopter. Quads may abstract away most of the aerodynamic problems faced by other rotorcraft systems through using software, but the helicopter has to solve those problems mechanically. And they are non-trivial problems, since the pitch of the rotors blades has to be controlled while the whole rotor disk is tilted relative to its axis.
The device that makes this possible is the swashplate, and its engineering is not for the faint of heart. And yet [MonkeyMonkeey] chose not only to build a swashplate from scratch for a high school project, but since the parts were to be cast from aluminum, he had to teach himself the art of metal casting from the ground up. That includes building at least three separate furnaces, one of which was an electric arc furnace based on an arc welder with carbon fiber rods for electrodes (spoiler alert: bad choice). The learning curves were plentiful and steep, including getting the right sand mix for mold making and metallurgy by trial and error.
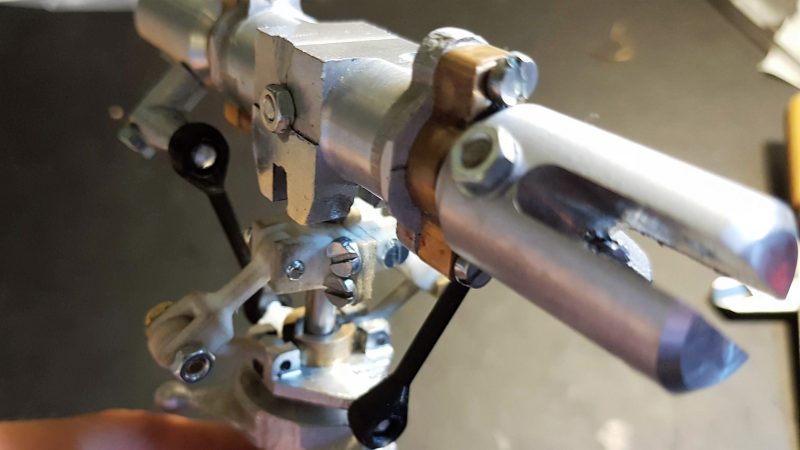
With some machining help from his school, [MonkeyMonkeey] finally came up with a good design, and we can’t wait to see what the rest of the ‘copter looks like. As he gets there, we’d say he might want to take a look at this series of videos explaining the physics of helicopter flight, but we suspect he’s well-informed on that topic already.
[via r/DIY]














Mechanical complexity has much to be admired, but ultimately software control is more scalable and redundancy easier to implement.
An ideal is to have as simple mechanical properties as possible with as few moving parts as possible and then complexity in software controlled by redundant systems .
I can attest to this. My research lab developed a new type of quadrotor with one large rotor and three little contra-rotating ones to do manoeuvering and counter-torque. To compensate for main rotor gyroscopics we needed to put a single pivot pin (a teetering flapping hinge) in the rotor head. Every time we talked to companies trying to commercialise it, they all got hung up on the “mechanical complexity” – ie, a single joint. But of course, if you just have to install the motors, screw down the rotors and go, it’s far more economical and cheaper to build/operate. We underestimate just how much overhead a single mechanical component can add.
But the whole design evaluation process for hovering aircraft had already been done and after all the considerations, single main rotor won. You can look up the history of helicopters and see for yourself.
You are probably trying to compete in a wrong application domain, where your design advantages are not a big deal, while its shortcomings are. You need to find companies who would want to use quadcopters but can’t, perhaps someone who needs more load-carrying capacity, or greater flight autonomy (unlike classic quad your design probably can use an ICE instead of an electric motor for powering main rotor)
Heavy lift is where, at a minimum, collective pitch becomes important – because as rotor diameter increases, inertia becomes a problem if your only control mechanism is speed.
IMO, it seems like the best balance of control/efficiency/simplicity would be collective pitch quadrotors like those demonstrated by MIT (can’t find a link at the moment) and Curtis Youngblood’s Stingray 500.
Collective pitch is a hell of a lot simpler mechanically than cyclic pitch…
which is all fine and dandy until you loose a motor and cant autorotate.
remember redundancy? a properly designed N-copter can lose N/2 -1 motors and still fly, so long as it has enough thrust and at least one motor of each CW and CCW motor remains.
I asked a pilot of a dual motor Cessna if the plane was safer because of the redundancy. He explained to me that the plane flew with two engines because it *needed two engines*. If one engine quit, the other was there to take him to the crash site.
The extra motor added so much weight and drag that it could barely glide on the remaining engine. Or so I was told.
Right, but the heavy part of an electrical drive system is the energy storage, not the engine, and if you google “robot athleticism” you can see a quad fly with two clipped props.
The thing with fixed wing aircraft is that they can fly without any engines running as long as all the aerofoils are still attached… Of course you will need to sacrifice altitude to maintain airspeed so you will need to land at some point but it will not fall out of the sky, this goes for anything from a Skyfox to a B747. Any thrust, whether from a prop or a jet engine, will flatted the glide slope so having a single engine in a heavily loaded light twin will still give you more options (Though there are other operational issues with light twins in combination with non-proficient pilots that make them dangerous, like their tendency to roll over and kill you when you’re going to slow single engine, but that’s more for a pilots forum).
Similar with a helicopter: As long as the rotor is still attached and controllable you can still ‘fly’ using autorotation it’s just that the glide slope is going to be much steeper than any but the most extreme fixed wing aircraft. As with fixed wing aircraft losing one engine will reduce the available thrust by 50% or more so if you were using more than 50% on both engines you will not be able to keep doing what you were doing (climbing, hoovering, flying straight and level) and that could put you in a real awkward situation if you happen to be hoovering over something you can’t land on… Of course if the swashplate breaks you’re shit out of luck, even on twin rotor helicopters (just like a 2 wing aeroplane can’t fly on a single wing), that’s why helicopter maintenance is much stricter regulated than fixed wing.
With a multi rotor that could be solved without adding mechanical complexity and as a bonus you could leave a gap open in the middle to shoot a ballistic recovery system (parachute) out of if you end up with no turning rotors at all cause your computers all crashed at the same time. Can’t wait for eVelo style two seat multicopters to take over the role of the R22s buzzing around our airfield!
Of course that’s fine for remote control aircraft, but if we’re ever talking about a manned design pilots definitely prefer a proven mechanical solution over complex software. That’ll probably change in time, it’ll be interesting to see if there are ever any serious large-scale manned quads.
Has anyone ever heard of one of those getting considered or rejected? Of course I’ve seen the backyard-built manned quads on youtube but I was thinking more about commercial designs.
Pilots prefer to feel as though they have a proven mechanical solution, there are plenty of fly by wire systems in service carrying passengers and cargo all over the world right now.
An interesting thing: we have to deliberately make the software handle the aircraft a little unsteadily, more like a mechanical system, so that the pilots feel like they have something to do.
Like adding artificial jerky shift points to a CVT, which partially negates the benefits of having a CVT in the first place, because having a car that you can’t feel gears shifting in doesn’t feel right to most people…..
Make that stupid bullshit optional. Put in a damn menu option or small button that says “Hey, I’m an idiot that can’t handle change, please make my car shake randomly for no reason”
Having owned two cars with CVTs, the only thing about them that feel like gears shifting is when the engine starts and stops.
That isn’t the case anymore. The F-35 is a total fly-by-wire fixed wing, uses an HMD to see through the floor boards. There is absolutely very little mechanical linkages anywhere in the whole aircraft, aside from the doors, and that’s just for mechanical advantage since they are using underpowered motors and actuators to save weight.
Nice job, young people designing and making things from scratch ought to be strongly encouraged!
For me it takes me back to the mid-70s and the ‘Polecat’, a scratchbuilt R/C helicopter whose plans were published in Radio Control Modeler August 1974. The model was built using al bar stock, al tubing and wooden rotor blades but I don’t think it had a scratchbuilt swashplate like this story features.
Found the plan! https://outerzone.co.uk/plan_details.asp?ID=6688
Such an amazing comment… I didn’t know about Polecat…
Kids these days.
What an amazing set of skills for a high-schooler.
If he doesn’t get an ‘A’ on that project I want to know what standard his teacher is going by…..
About ten or more years ago my next door duplex had a curb dump which included a full collective helo sans remote and batt. I have never messed with it, it’s tail motor OK but rotor is missing. It’s mech porn to look at. I seem to remember that article on RCM, come to think I may have it stashed away somewhere.
I currently have 4 CP helos (two 450 size, a 550 and a 620). The largest has a blade diameter of about 4 feet. The older helos have full Bell-Hiller heads, which are definitely “mech porn” as they are much more complex than the newer “flybarless” heads which use 3 axis gyros instead of the flybar. Here’s a picture of the Kasama CNC aluminum Bell-Hiller head: https://drive.google.com/open?id=1SBs2NAjNk_l0PLKyds1CLRXYkmJ3bTCa
Started it all? Autogyro!