Join us on Wednesday, May 20 at noon Pacific for the Animatronics Hack Chat with Will Cogley!
While robots have only a made a comparatively recent appearance on the technology timeline, people have been building mechanical simulations of living organisms for a long time indeed. For proof, one needs only to look back at the automatons built by clever craftsmen to amuse and delight their kings and queens. The clockwork mechanisms that powered fanciful birds and animals gave way to the sophisticated dolls and mannequins that could perform complex tasks like writing and performing music, all with the goal of creating something that looked and acted like it was alive.
Once the age of electronics came around, the springs that drove the early automatons and the cams that programmed their actions were replaced by motors and control circuits. New materials made once-clunky mechanisms finer and more precise, sensors and servos made movements more lifelike, and the age of animatronics was born.
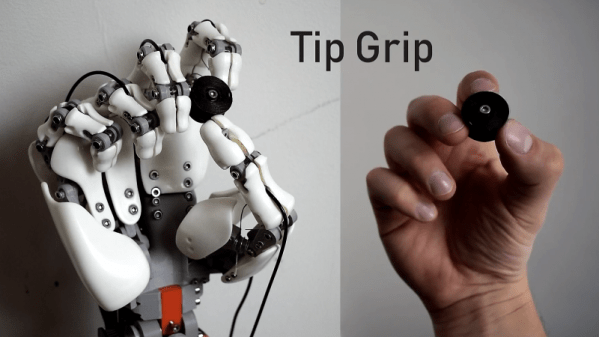
Animatronics have since become a huge business, mostly in the entertainment industry. From robotic presidents to anachronistic dinosaurs to singing rodents designed to sell pizza, animatronics have been alternately entertaining and terrifying us for decades. The fact that they’re not “real” robots doesn’t make the melding of mechanical, electrical, and computer systems into a convincing representation of a real being any less challenging. Will Cogley has more than a few amazing animatronic designs under his belt, some of which we’ve featured on Hackaday. From hearts to hands to slightly terrifying mouths, Will puts a ton of work into his mechanisms, and he’ll stop by the Hack Chat to tell us all about designing and building animatronics.
 Our Hack Chats are live community events in the Hackaday.io Hack Chat group messaging. This week we’ll be sitting down on Wednesday, May 20 at 12:00 PM Pacific time. If time zones have got you down, we have a handy time zone converter.
Our Hack Chats are live community events in the Hackaday.io Hack Chat group messaging. This week we’ll be sitting down on Wednesday, May 20 at 12:00 PM Pacific time. If time zones have got you down, we have a handy time zone converter.
Click that speech bubble to the right, and you’ll be taken directly to the Hack Chat group on Hackaday.io. You don’t have to wait until Wednesday; join whenever you want and you can see what the community is talking about.