
Dexter, an open-source, high-precision, trainable robotic arm has just been named the Grand Prize winner of the 2018 Hackaday Prize. The award for claiming the top place in this nine-month global engineering initiative is $50,000. Four other top winners were also named during this evening’s Hackaday Prize Ceremony, held during the Hackaday Superconference in Pasadena, California.
This year’s Hackaday Prize featured challenges with five different themes. Entrants were asked to show their greatest Open Hardware Design, to build a Robotics Module, to design a Power Harvesting Module, to envision a Human Computer Interface, or to invent a new Musical Instrument. Out of 100 finalists, the top five are covered below. Over $200,000 in cash prizes have been distributed as part of this year’s initiative where thousands of hardware hackers, makers and artists compete to build a better future.
Dexter: High Precision Robotic Arm
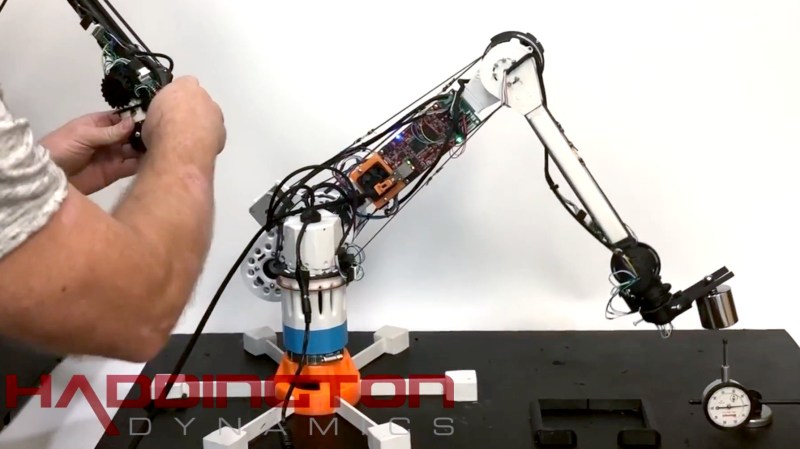
Dexter is the Grand Prize winner of the 2018 Hackaday Prize. This remarkable robotic arm design brings many aspects of high-end automation to an open source design which you can utilize and adapt for your own needs. In addition to impressive precision, the design is trainable — you can move the joints of the arm and record the motion for playback.
The image here shows position data from one arm being moved by a human, controlling another arm in real time. Each joint utilizes a clever encoder design made up of a wheel with openings for UV sensors. Sensing is more than merely “on/off”. It tracks the change in light intensity through each opening for even greater granularity. The parallel nature of an FPGA is used to process this positioning data in real time.
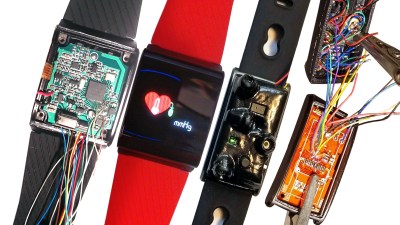
Hack a $35 Wearable to Build Mental Health Devices
Manufacturing custom electronics is a tricky, costly, and time-consuming process. What if you could sidestep most of that by starting with a powerful, proven consumer good that is modified to your specifications? This project takes existing fitness trackers and customizes the hardware and software to become sensor suites for mental health research. Dig into this one and see how they can help patients become aware of unconscious behaviors (like trichotillomania which is compulsive hair pulling) and change them over time.

Portal Point Generator
This project focuses on an alternative power source for times when traditional infrastructure is not functioning or simply not available. You may be familiar with generators made using DC motors. The Portal Point Generator replicates that simplicity, but goes beyond with instructions for building the generator itself for far greater efficiency. A winding jig is used to make the coils which are placed inside of the 3D printed generator parts along with permanent magnets to complete the build. Here you can see it in testing as a wind generator in Antarctica, but it is easily adapted to other applications like using water wheels.

EmotiGlass
There is a body of research that suggest a link between cardiac cycle and anxiety-producing visuals; you may have a different emotional reaction to the things you see based on what part of a heartbeat is occurring when your brain process information from your eyes. This could have profound implications in areas like PTSD research. EmotiGlass uses LCD screens to selectively block the wearer’s vision. This can be synchronized with heat beat, avoiding the instant where a negative emotional response is most likely. Think of them as 3D shutter glasses for mental health research.

PR-Holonet: Disaster Area Emergency Comms
Recovering from natural disasters is an enormous challenge. The infrastructure that supports the community is no longer in place and traditional communications simply cease to exist. PR-Holonet was inspired by the recovery process after hurricanes in Puerto Rico. It leverages the availability of commercial electronics, solar power sources, and enclosures to build a communications system that can be deployed and operated without the need for specialized training. Once in place, local devices using WiFi can utilize text-based communications transferred via satellite.
Congratulations to all who entered the 2018 Hackaday Prize. Taking time to apply your skill and experience to making the world better is a noble pursuit. It doesn’t end with the awarding of a prize. We have the ability to change lives by supporting one another, improving on great ideas, and sharing the calling to Build Something that Matters.

















Im looking for the vhdl code for dexter but all i find is
–instance Azido black box
Can someone point me in the right direction?
Im presuming it is avaliable as “Everything is Open Source”
The FPGA code isnt written in VHDL. Its done in Viva which is not (currently) open source, but we hope it will be. The source files for that ARE released, and a limited number of licenses for Viva /might/ be available for serious hackers. Thats the level best we can do, and we do understand its not ideal. We are working to make it better.
There are better looking robotic arm projects are on hackaday.io (not sure if they entered into the contest or not).
But this one really shines at documentation (assembly videos!) and software.
This one really shines (also featured on hackaday.com last year).
https://hackaday.io/project/19968-walter
which is based on Andreas’ work:
https://hackaday.io/project/3800-3d-printable-robot-arm
Also this one looks really nice too:
https://hackaday.io/project/19081-niryo-one
Congratulation to the winner!
You are /completely/ correct about looks. LOL. Our new Dexter HD has “skins” that make it look a bit better, although not as artistic as those you mentioned. We only added those skins as prep for entering workspaces where we need to be protected from fluids, dust, etc… It would certainly be wonderful if someone with a flair for designing covers wanted to jump on the project.
There are far too many robot arms out there already, why are we rewarding mediocrity?
So you say this is worse than the alternatives?
I suspect with this one the main difference is the use of the harmonic drives and perhaps the fpga for precision
Hint: “encoder”
https://github.com/HaddingtonDynamics/Dexter/wiki/Encoders
As someone who studied robotics engineering in college well done, James thats a brilliant encoder implementation, and I hope to give it a shot in some projects of my own, congrats!!!!
Congratulations to Dexter. An amazing project that has been very well executed and will no doubt prove to be useful in all sorts of ways.
Forgive me for sayin’, but I don’t see anything mentioned, at least in the article, that differentiates Dexter from any given industrial robot arm made in the past ten years or so. Has nobody at Hackaday ever been to eg a Ford factory…?
Sorry, but I just don’t see the novelty here.
…but then, I’m “that one salty guy in the comments” who has maintained for some time that the Hackaday Prize was completely irrelevant to everything because they always picked the most useless BS thing to win — or the least deserving. (Remember that “grassroots” satellite tracking thing that won one year…? Yeah, that was crap. I haven’t heard a peep from ’em since… maybe because you can do exactly their thing from a NASA webpage already…) So dontcha know you can’t trust what I say anyways… at least, according to Benchoff… harrumph. Get off my friggin lawn.
Being a salty old guy I appreciate your comment. But…
1. Nothing in that factory is open source.
2. The encoder.
https://github.com/HaddingtonDynamics/Dexter/wiki/Encoders
(1) Nobody cares, except *possibly* Richard Stallman and the more militant amongst his ilk. Seriously. The applications for an open-source robot arm are roughly identical to that of a closed-source robot arm — the “you can build it yourself” thing is a nice sales pitch, but in practical, real-world consideration is a no-op except for niche use-cases that really are better thought of as marketing fluff than as anything that’s going to bring home a paycheck.
(2) …which are absolutely nothing novel. I’ve heard of gray-code rotary encoders before. Whoopdeedoo.
1. Well, if you don’t care about open source, nothing I say will change your mind.
2. You don’t understand how our encoders work, or you don’t understand what “gray-code” is.
In either case, you’re right: Whoopdeedoo.
It’s inaccurate to say “I don’t care about open source” — I do. I just don’t see that an open-source robot arm has any *meaningful* advantages over a closed-source one.
Key word: meaningful.
CONGRATULATIONS to all prize winners.
You and me both. What a waste of money…
I didn’t expect any of these guys, congrats to all, really like the selection of winners this year!!!