In his continuing quest to reduce the parts count of a robot as far as possible, [Carl Bugeja] has hit upon an unusual design: robots built of almost nothing but PCBs.
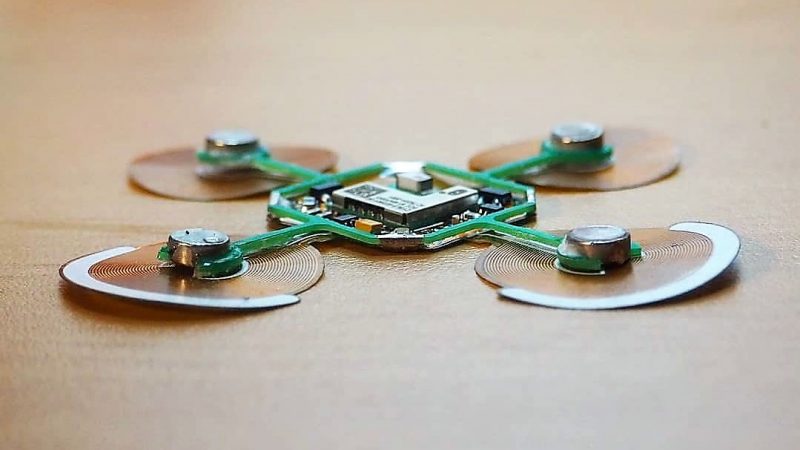
Admittedly, calling these floppy four-legged critters robots is still a bit of a stretch at this point. The video below shows that while they certainly move under their own power, there’s not a lot of control to the movement – yet. [Carl]’s design uses an incredibly fragile looking upper arm assembly made from FR4. Each arm holds a small neodymium magnet suspended over the center of a flexible PCB coil, quite like those we’ve seen him use before as actuators and speakers. The coils are controlled by a microcontroller living where the four legs intersect. After a few uninspiring tethered tests revealed some problems with the overly compliant FR4 magnet supports, [Carl] made a few changes and upped the frequency of the leg movements. This led to actual motion and eventually to untethered operation, with the bot buzzing around merrily.
There are still issues with the lack of stiffness of the magnet arms, but we’re optimistic that [Carl] can overcome them. We like this idea a lot, and can see all sort of neat applications for flapping and flopping locomotion.













Angled toothbrush bristles on each coil and it will go where you want provided you drive the right coil.
I was thinking similarly. Hoppers and vibration feeders have been programming vibration with direction for a long time. https://www.generalkinematics.com/vibrating-feeders-for-stockpile-and-reclaim-gk-feeders/
Hook side of velcro could work in this scale maybe? You can get those with sticker background. May need some modifying though (trim with a shaver to get sharp ends instead of hooks, bend with heat to correct angle).
In order to increase the efficiency/force, I was wondering if you couldnt replace the flex coils with a ferrite smd inductor (also mounted on a flex)? I am expecting the guidance of fields to be a lot better and therefore to get more force for less power.