
Running a brushed motor in muddy or dusty environments takes a toll on controllers, with both heavy back EMF and high stall currents. This explains one of the challenge in Europe’s Hacky Racer series, which is decidedly more off-road than America’s Power Racing Series.
In pushing these little electric vehicles to the limits, many builders use brushless Chinese scooter motors since they’re both available and inexpensive. Others take the brushed DC route if they’re lucky enough to score a motor — and then the challenge becomes getting the most performance without burning up your controller. To fix this, [MechanicalCat] has come up with a current limiter for cheap DC motor controllers.
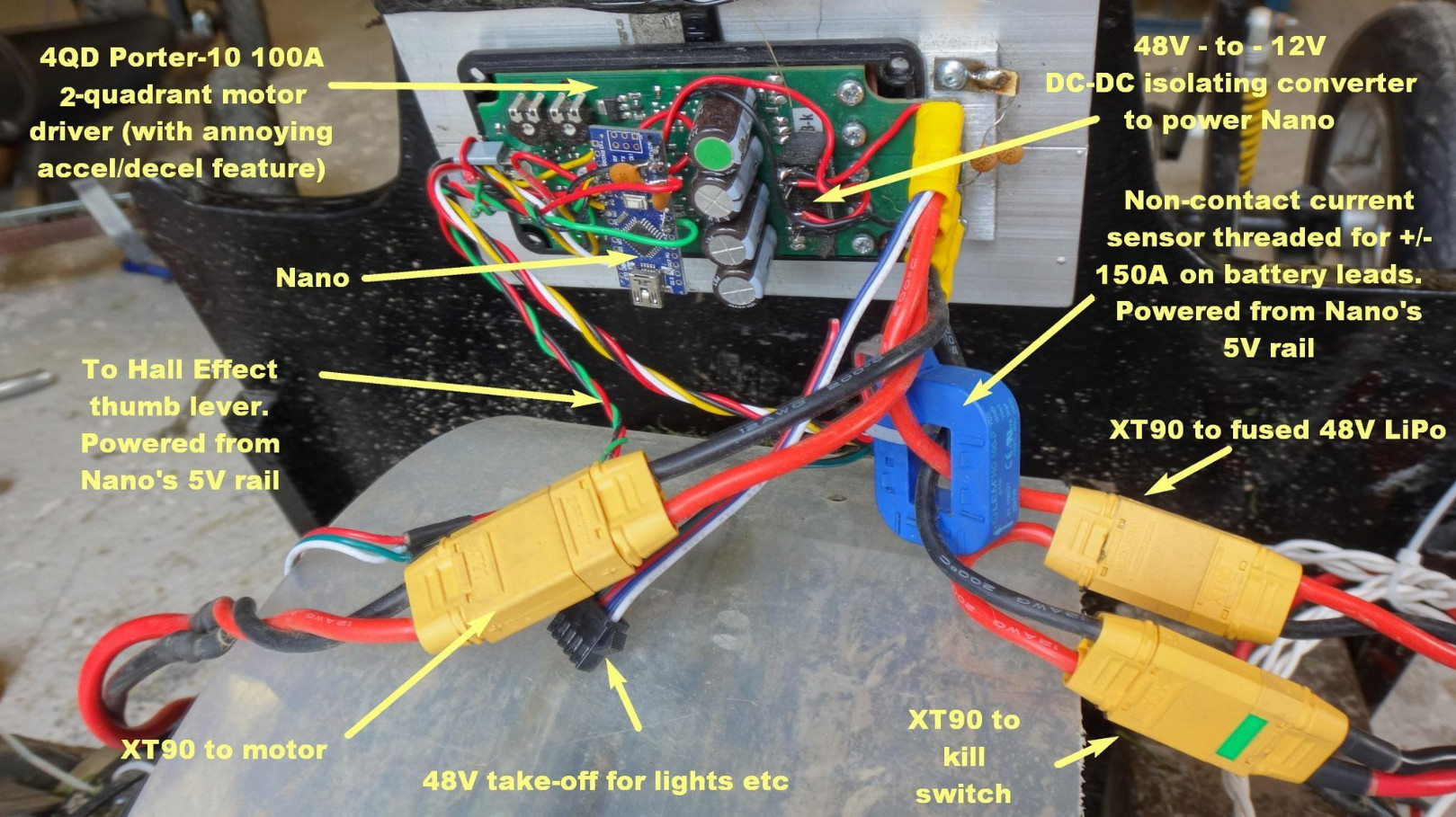
The full write-up is in the included PDF file, and describes the set-up of an Arduino Nano sitting between throttle and controller, and taking feedback from a current sensor. The controller in question is a 4QD Porter 10 so an extra component is a DC-to-DC converter to provide a floating ground for the Arduino. However, there is also the intriguing possibility of the same set-up being used with absurdly cheap Chinese motor controllers. There is also advice on fitting flyback diodes, something which might have saved one controller in the Hackaday pits last year.
It’s yet to be seen what effect this will have on Hacky Racer competitiveness, however its applications go far beyond that field into anywhere a reliable small DC motor drive on the cheap is required. Meanwhile, if you’re unsure where this Hacky Racer stuff came from, you could start here.














This is more of an open series vs Power Racing is limited by current draw, price $500 and footprint. They don’t allow Li-Po to prevent firey desth.