Soft robotics is an exciting field. Mastering the pneumatic control of pliable materials has enormous potential, from the handling of delicate objects to creating movement with no moving parts. However, pneumatics has long been overlooked by the hacker community as a mode of actuation. There are thousands of tutorials, tools and products that help us work with motor control and gears, but precious few for those of us who want to experiment with movement using air pressure, valves and pistons.
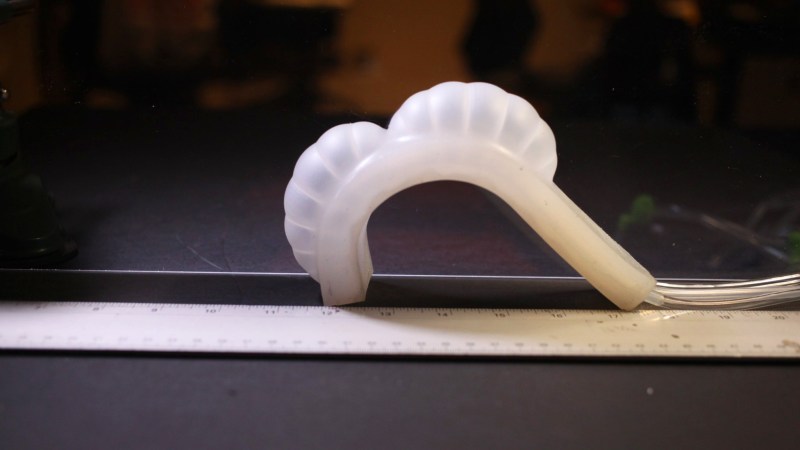
Physicist and engineer [tinkrmind] wants to change that. He has been developing an open source soft robotics tool called Programmable Air for the past year with the aim of creating an accessible way for the hacker community to work with pneumatic robotics. We first came across [tinkrmind]’s soft robotics modules at World Maker Faire in New York City in 2018 but fifty beta testers and a wide range of interesting projects later — from a beating silicone heart to an inflatable bra — they are now being made available on Crowd Supply.
We had the chance to play with some of the Programmable Air modules after this year’s Makerfaire Bay Area at Bring A Hack. We can’t wait to see what squishy, organic creations they will be used for now that they’re out in the wild.
If you need more soft robotics inspiration, take a look at this robotic skin that turns teddy bears into robots from Yale or these soft rotating actuators from Harvard.
See a video of the Programmable Air modules in action below the cut.














“creating movement with no moving parts” Please explain this further, I am intrigued.
I guess it’s meant to say that there are no moving parts in the robot itself. For example, if movement is being generated by a cavity being filled, the only moving parts could be a valve opening and the air itself rushing in. In contrast to regular robotics, where you’d have moving servos and gears and such.
It’s a kōan.
Like – “What is the sound of one hand clapping”
I’ll defer that to an Old Master: https://en.wikipedia.org/wiki/Zeno_of_Elea
Actually, the field of soft robotics offers a lot of ways to generate ‘movement with mo moving parts’ e.g. di-electric actuators: https://en.wikipedia.org/wiki/Dielectric_elastomers
https://www.crowdsupply.com/tinkrmind/programmable-air
The problem with pneumatics in they’re either extremely complicated or imprecise, the only exception being where a cylinder is driven to one extreme or the other, stopping it halfway is a nightmare.
oh and the somewhat wasteful air compressing.