Your garden variety car generally comes with four wheels, plus a spare in the boot. It’s a number landed upon after much consideration, with few vehicles deviating from the norm. That doesn’t mean there aren’t other possibilities however, and [RCLifeOn] decided to experiment in just such a manner.
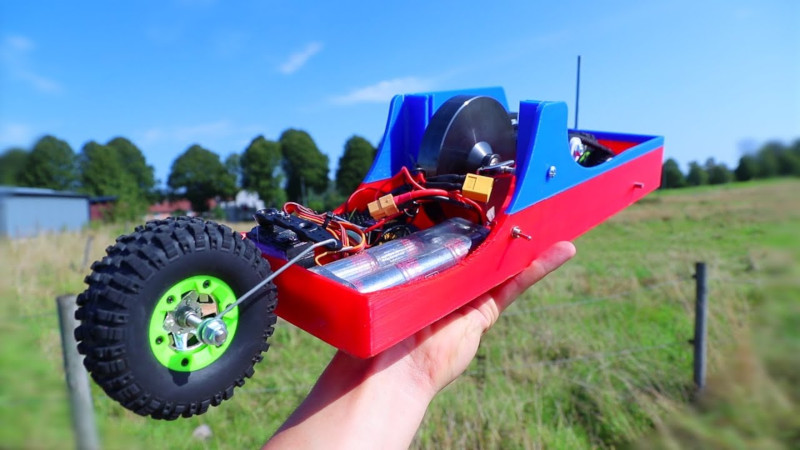
The result is a gyro-stabilized two-wheeled RC car, or as we might have put it, a motorcycle of sorts. A brushless motor drives the rear wheel, while steering up front is handled by a servo controlling the front wheel. A large spinning disc acts as a gyro in the center of the vehicle, and it’s all packaged in a simple 3D printed frame.
Results are impressive, with the gyro making a demonstrable difference to the vehicle’s performance. While it can be driven without the gyro enabled, it requires continual steering corrections to stay upright. With the gyro spun up, it rides much more like a bicycle, with few stability issues.
It’s a fun project, and a great way to learn about gyroscopic stability. Of course, there are great primers on the topic, too. Video after the break.














He does mention the 1950s version, but the idea goes back at least as far as 1911 with the first working example in 1912.
https://en.wikipedia.org/wiki/Gyrocar
All great fun, all rather pointless…
You know they had robot motorcycles in Terminator Salvation… no, you probably didn’t know that, nobody saw that movie because it sucked.
So did he develop a 2 wheel car or a lousy motorcycle? Not sure what he is trying to prove here.
where did he buy the gyro i wonder?
Nicely done.Now it would be nice to see the project continued by placing the gyro in a gimbal so that it would self balance the car while it was standing still. That would also remove the side to side oscillations and make for a much smoother riding car. But of course difficult to do as it would require either passive control of the gyro which is not the most stable or active control of the gimbal which is very difficult to do.
Awesome build, great video, with lotsa fun and building tips.
Now I’m wondering if an IMU and servomotor sliding a lead weight from side to side with a PID controller, could counteract falling. At speed you could even treat the weight like a motorcycle rider leaning into a curve to counteract the centripetal force with gravity (and friction) to be able to take corners at a higher speeds. But then you are probably heading in the direction of stepping on the toes of Boston dynamics (and Terminator Salvation).
Wonder no more…
https://youtu.be/fWEOXuiDqh4
thats how honda did it.
OOPs….
I posted the wrong self balancer…
Hondas doesnt gyro balance…but it isnt the weight shifter I meant to cite.
So let me try again?
Wonder no more…..
https://youtu.be/InTJW1TeCLs
Thats how YAMAHA did it.
When you’re bored with 4 wheels on a car…
http://www.douglas-self.com/MUSEUM/TRANSPORT/nwheelcar/nwheelcar.htm
(Not my site, just a fan.)
I loved it, I didn’t expect to spend an hour there.
Who need a gyro when you have a wheel? Bicycle and unicycle don’t need gyro because a rotating wheel is a gyro.
But notice when he turns off the gyro, it doesn’t stay balanced. His small wheels don’t have enough mass to act as gyros – so I guess there is some value here in having the gyro.
Except that it’s not significant. Bicycles have been built with ridiculously tiny wheels to minimize the gyro effect – it’s an active steering correction just as with this project, except the “gyro” is our sense of balance. The references in this are useful.
http://www2.eng.cam.ac.uk/~hemh1/gyrobike.htm
Bicycle wheels don’t self balance because of the gyroscopic effects of a wheel. It’s because when a wheel leans to one side or the other, riding on the side of the tire redirects the forces of the wheel to steer itself out of the lean.
I’d guess it’s also why this RC thing doesn’t balance well without the gyro, the tread design is too squared off so it can’t counter the minor forces and has to lean more before it starts riding on the side of the tire. A rounded tire like an RC buggy wheel should work better.