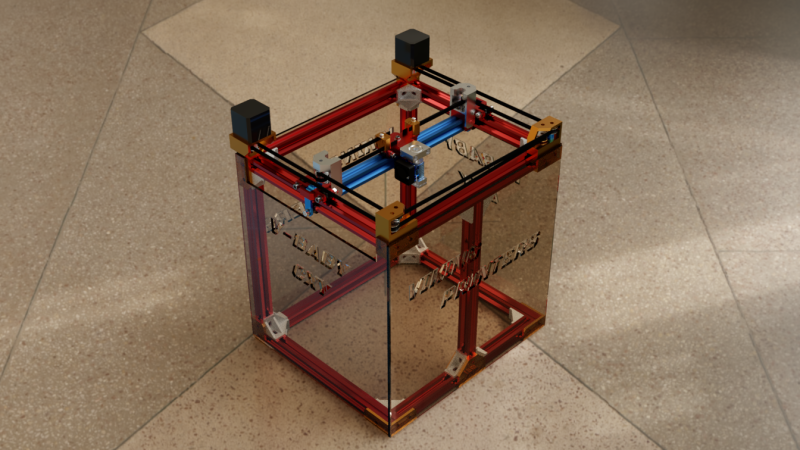
Too often when you see a build video, you only get to see the final product. Even if there’s footage of the build itself, it’s usually only the highlights as a major component is completed. But thankfully that’s not the case with the “V-Baby” CoreXY 3D printer that [Roy Berntsen] has been working on.
Watching through his playlist of videos, you’re able to see him tackle his various design goals. For example he’d like the final design to be both machinable and printable, which is possible, but it certainly adds complexity and time. He also transitions from a triangular base to a rectangular one at some point. These decisions, and the reasons behind them, are all documented and discussed.
Towards the end of the series we can see the final testing and torturing process as he ramps up to a final design release. This should definitely demystify the process for anyone attempting their first 3D printer design from scratch.













Awful thing is that there are almost no videos of machine at work. Just the guy telling a story and showing printed objects and CAD. Not I don’t beive him, but saying “this item was printed with 150mm/min speed and 300mm/min travel with 0.1mm layer height” and not showing the moves? C’mon running that fast is a feat itself!
mm/s of course
I will for sure post some movements
Thanks for the feedback. I will make sure to post some moves very soon. This is of course very important
I haven’t followed FDM printers for a while, why is coreXY popular? And if he says in the videos, I can’t watch them here at the moment.
well many things are nice. It’s better than Hbot in a mechanical way, i don’t know the specifics but I know coreXY has better stability and hasn’t got the problems related to fast movements with Hbot. the X and Y moves have similar mass, as opposed to a huge aluminum slab with a 3mm glass on top for Y.
Depending on the construction you can have less ringing, as opposed to the usual XZ plane on Prusas that is a little flappy (even with aluminum extrusion, although much less so). Also you have the possibility to use 3 Z motors to level the bed itself instead of having to rely in bed leveling, but that’s another category of machine as you’d probably spend a lot of money on that system with 3 motors and 3 drivers.
Also this might not be 100% related but with a beefy hotend and low mass on the carriage you CAN theoretically print at absolutely stupid speeds with the belt tensions well dialed in, since the carriage can zip around fast (not sure if direct drive or Bowden, but I’d imagine you need a pancake extruder motor to lower the mass). there’s a video going around of one of these printing extremely fast like it’s not a big deal
But let’s face it, i want one because they look cool
Thanks, useful.
Hackaday’s own writer wrote an excellent article about core XY..
http://www.doublejumpelectric.com/projects/core_xy/2014-07-15-core_xy/
Compared to an Hbot the two belt paths eliminate the racking forces on the moving axis. On a traditional crossed belt path the racking forces on the effector are also cancelled, but this isn’t generally as critical, and the stacked belt path does away with belt twists and the risk of a belt climbing off an idler. The downside (there’s always one!) is that the belts are longer than in an h-bot or stacked cartesian design, and so more prone to ringing. Compared to a crossed gantry design the CoreXY uses less hardware, but one axis has more moving mass than the other, which limits the maximum acceleration.
Thanks, and now I also know that H-bots and coreXY are distinct, which I had missed before.
It is easy to print, and easy to customize if you need to. Since it is just now coming out of beta, and available on github, you’ll see more soon…
This is super cool, but have you heard of a guy named Bill Masters? I recently read an article on OZY about how Masters developed the first 3D printing patent – then lost it. Anyone know anything about this? Here it is for reference: http://www.ozy.com/flashback/and-he-could-have-been-the-father-of-3d-printing/81198#.WeXu6REalHI.twitter
Here is the machine at work. High speed 3d print
https://youtu.be/9U_CDqcJ9Wo
Here is the first in a series of build videos for this machine:
https://youtu.be/SRd4WD_aPp0
Everytime I turn around Roy has designed a new machine. Keep up the good work!