For about as long as hackers and makers have been using desktop 3D printers, there have been critics that say the plastic parts they produce aren’t good for much else than toys and decorative pieces. They claim that printed parts are far too fragile to be of any practical use, and are better suited as prototype placeholders until the real parts can be injection molded or milled. Sure. Try telling that to [Engineering Nonsense].
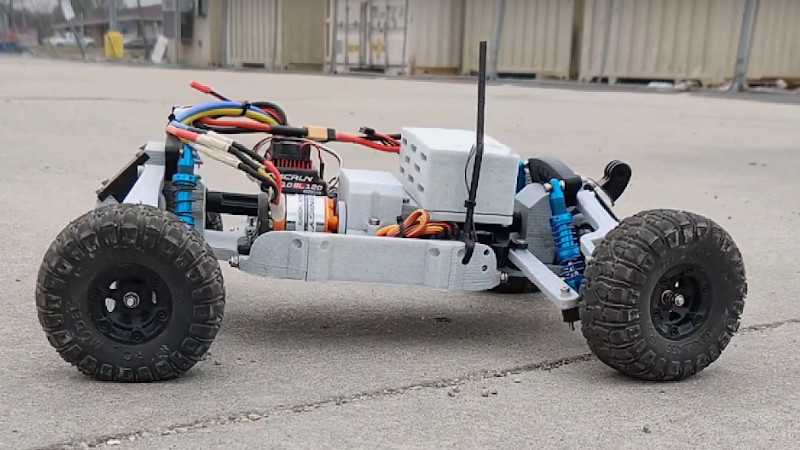
He recently wrote in (as did a few other people, incidentally) to share the latest version of his incredible 3D printed remote control car, and seeing it tearing around in the video after the break, “fragile” certainly isn’t a word we’d use to describe it. Though it didn’t get that way overnight. The Tarmo4 represents a year of development, and as the name suggests, is the fourth version of the design.
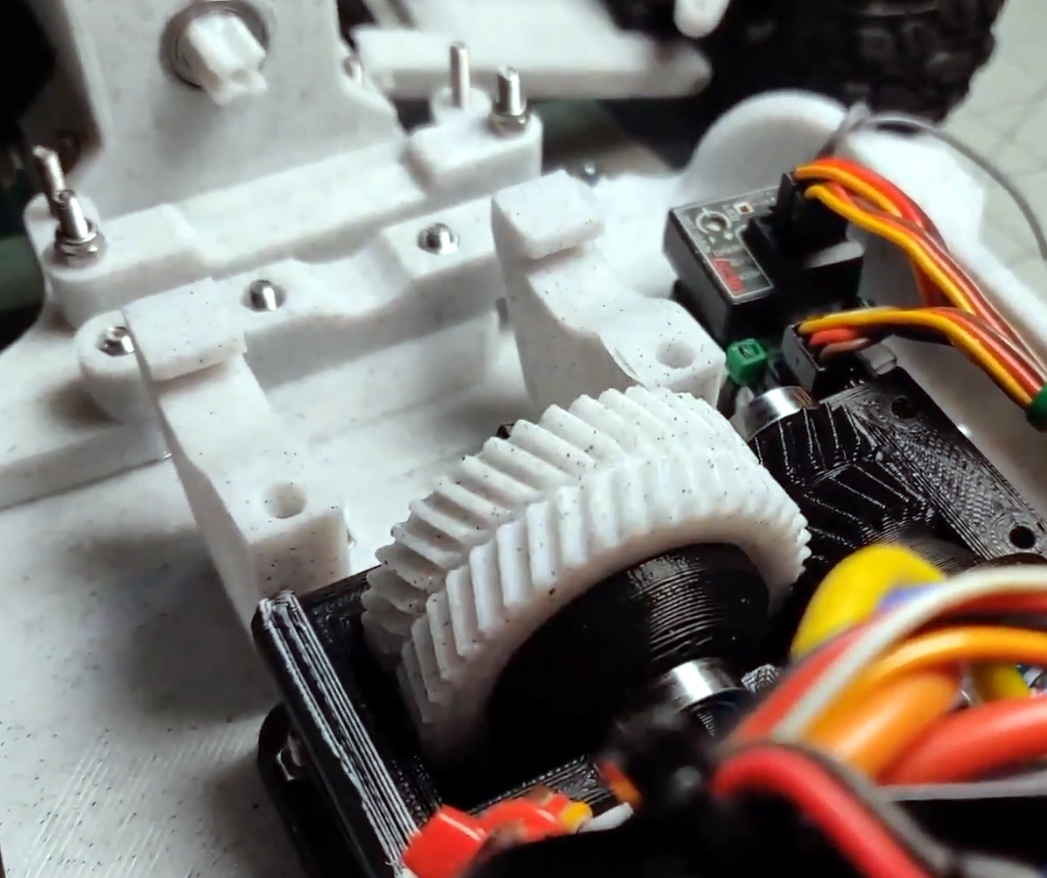 We know the purists out there will complain that the car isn’t entirely 3D printed, but honestly, it’s hard to imagine you could get much closer than this. Outside of the electronics, fasteners, tires, and shocks, the Tarmo4 is all plastic. That includes the gearbox and drive shafts. [Engineering Nonsense] even mentions in the video that he’s not happy with the tires he’s found on the market, and that they too will likely get replaced with printed versions in the future.
We know the purists out there will complain that the car isn’t entirely 3D printed, but honestly, it’s hard to imagine you could get much closer than this. Outside of the electronics, fasteners, tires, and shocks, the Tarmo4 is all plastic. That includes the gearbox and drive shafts. [Engineering Nonsense] even mentions in the video that he’s not happy with the tires he’s found on the market, and that they too will likely get replaced with printed versions in the future.
While the car is certainly an incredible technical achievement, what’s perhaps just as impressive is the community that’s developed around it in such a relatively short time. Towards the end of the video he shows off a number of custom builds based on previous iterations of the Tarmo. We’re sure that interest from the community has played a part in pushing the design forward, and it’s always good to see a one-off project become something bigger. Hopefully we’ll be seeing even more from this passionate community in the near future.
Just like the Open R/C Project, Tarmo proves that 3D printed parts are more than a novelty. If these diminutive powerhouses can run with printed gears and drive shafts, then you shouldn’t have anything to worry about when you run off the parts for your next project.














Now if I were trying to prove a point about real world usefulness, I think I’d pick something better than what 99% of the world is going to regard as a toy car. Or is Tom doing that thing again, putting claims in the makers mouth which get us all wound up at him for nothing.
Maybe you’re doing that thing again where you read too far into things and claim something that’s not even stated.
Since we’re making assumptions today… I’ll say there’s a good chance that 99% of the world won’t ever read this article and so it was never meant for “them”.
It is finally here, yessssssssss! Thanks for reminding me of this hackaday.
I guess I’ll try this one out. Would love to build a self-driving car out of this, but not sure how hard it would be to add encoders to all the wheels, but it should be possible with some small hall encoders.
There’s so much flex (“torque dampening”) and differentials galore, I’d guess you really need to measure at the wheels. Of course, the way it’s being driven in this video, the wheels are slipping half the time anyway…
Computer vision? GPS? :)
Oh yes, obviously measuring directly at the wheels. Didn’t think about the torque dampener though. Maybe some other mother and then print the torque dampener rigid? Maybe that works. And then yes, build some layer above all the other stuff with some jetson nano and a camera on it or something like that. But yes, it will probably not very accurate in positioning and i am very unsure how much you could compensate with computer vision
Oh god, i am tired. s/mother/motor – What the heck happened here? meaning a motor with A LOT less rpm. It doesn’t need to drive fast
I looked at the build sheet – interesting that all the parts are PLA. I would have thought that they would be too brittle. I’d love to see real world tests of parts made with different kinds of materials.
Also, I appreciate videos where people talk about all the things they don’t like about the project, the things that went wrong and all the things they want to change – it gives a much more authentic feel of how projects go.
CNCkitchen on youtube does many tests: impact test, tensile modulus, heat resistance of all sorts of printed materials on his youtube channel. Do check it out. PLA is pretty strong, obviously nice and easy to print but something like nylon or polycarbonate would be ideal (that being said its a absolute bitch to print)
Nylon, Nylon X and Nylon K variations I think would build the most durable and reliable version of the car. I’ll be doing it some point in the next year. Head over to engineeringns on reddit to see what we are all doing with the project. 😀
Curious how long the gears last; that’d be an interesting experiment in itself.
I’ve been meaning to make an automated rover for some time; mainly to have it drive up the road when it snows and take a few pictures so I know what the road conditions are like.
According to Engineering nonsense in a reddit post he said that the gears hadn’t broken yet (pla) and that so far he had driven it hard for 4 hours. It’s because they are made as v shaped gears and are very wide for good transference of torque. 😉