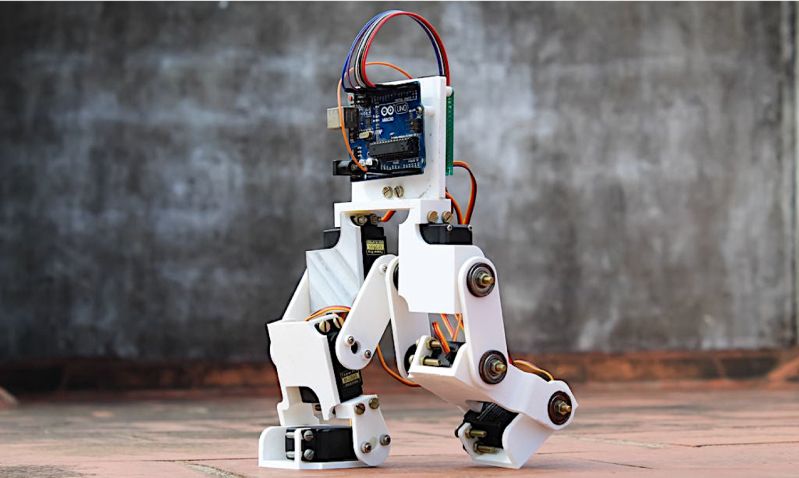
Robotics projects are always a favorite for hackers. Being able to almost literally bring your project to life evokes a special kind of joy that really drives our wildest imaginations. We imagine this is one of the inspirations for the boom in interactive technologies that are flooding the market these days. Well, [Technovation] had the same thought and decided to build a fully articulated robotic biped.
Each leg has pivot points at the foot, knee, and hip, mimicking the articulation of the human leg. To control the robot’s movements, [Technovation] uses inverse kinematics, a method of calculating join movements rather than explicitly programming them. The user inputs the end coordinates of each foot, as opposed to each individual joint angle, and a special function outputs the joint angles necessary to reach each end coordinate. This part of the software is well commented and worth your time to dig into.
In case you want to change the height of the robot or its stride length, [Technovation] provides a few global constants in the firmware that will automatically adjust the calculations to fit the new robot’s dimensions. Of all the various aspects of this project, the detailed write-up impressed us the most. The robot was designed in Fusion 360 and the parts were 3D printed allowing for maximum design flexibility for the next hacker.
Maybe [Technovation’s] biped will help resurrect the social robot craze. Until then, happy hacking.














Watching the video shows that the actual walking is very different from the motion implied by the photo use in the article. To me this doesn’t seem any better than those cheap wind up toys that have existed for over 50 years.
How about something like this?
https://www.kickstarter.com/projects/1957597055/super-anthony-the-battle-robot-with-45-kg-servo-fo/
There are a lot videos on youtube:
https://invidio.us/search?q=Super+Anthony+Robot
Pretty sure can be easy replicate for 10-15$.
The problem is the lack an ankle, so it cannot compensate by moving the centre of mass and cant lift up its legs enough to perform the expected motion
The problem is that it is a 3DOF leg which makes the math for the IK easier, but the human leg is actually a 6DOF leg. You have 2 at the ankle, 1 at the knee, and 3 at the hip. For the pair, that is 12DOF which allows for much more movement than this thing can achieve. Also, to have a stable walking gait, the COM of the robot has to stay over the polygon created by the contact points. For a bipedal robot, this is a line when both feet are on the ground and a point when 1 foot is one the ground, so this extra movement is vital. Humans actually don’t use a stable walking gate, we use a dynamic walking gate where we actually catch ourselves from falling by putting our other foot down. To achieve a dynamic walking gate, you would probably need 9-axis IMUs on each leg, probably 1 on the body as well, and even more math. We are talking calculus/diff eq level problems here.
robots got swagger.
Looks like it’s trying to do a James Brown slide! Make it moonwalk!
https://www.youtube.com/watch?v=1UzZUfFUnxY