We all get a bit lonely from time to time and talking to other humans can be a challenge. With social robots still finding their way these days, [Markus] decided to find a DIY solution he could make cheaply, resulting in the “Conversation Face.”
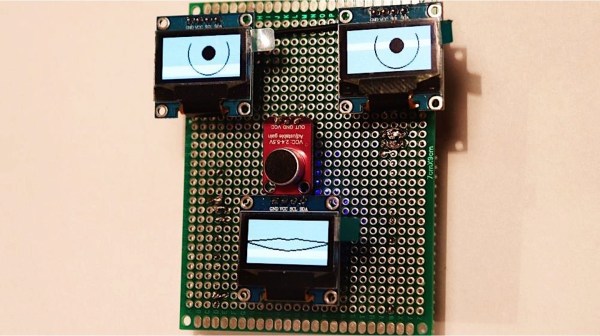
The build is actually pretty simple, really. You have three different OLED displays, two for the eyes and one for the mouth, that have different graphic images programmed onto them depending on the expression being displayed. There’s also a small electret microphone that senses when you are speaking to the face. Finally, a simple face cutout covers the electronics and solidifies the aesthetic.
The eyes are programmed identically since they would move together for most expressions. [Markus] was able to get a blinking animation by quickly moving a white circle vertically through the eye screens and the results are pretty convincing. He also moves the eyes around the OLED to make the expressions seem more dynamic.
There’s not much to the mouth. [Markus] only has a mouth open and a mouth closed animation. The mouth opens when it’s the face’s turn to talk or closes when the face should be listening. This information is easily determined by measuring the output of the microphone. Interestingly enough, you can program the face to be quiet and attentive when it’s being spoken to or quite chatty to show that it’s actively engaging in the conversation.
I don’t know about you, but we can’t decide if the Conversation Face is more or less creepy than those social robots. Either way, we thought you would get a kick out of it regardless. It also looks like a funny anime character if you ask us.











