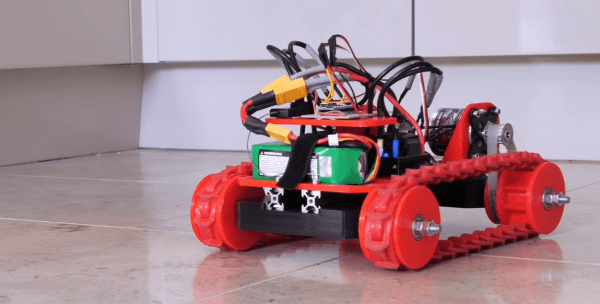
Master of 3D printed robots, [James Bruton], plans to do some autonomous rover projects in the future, but first, he needed a modular rover platform. Everything is cooler with tank tracks, so he built a rover with flexible interlocking track sections.
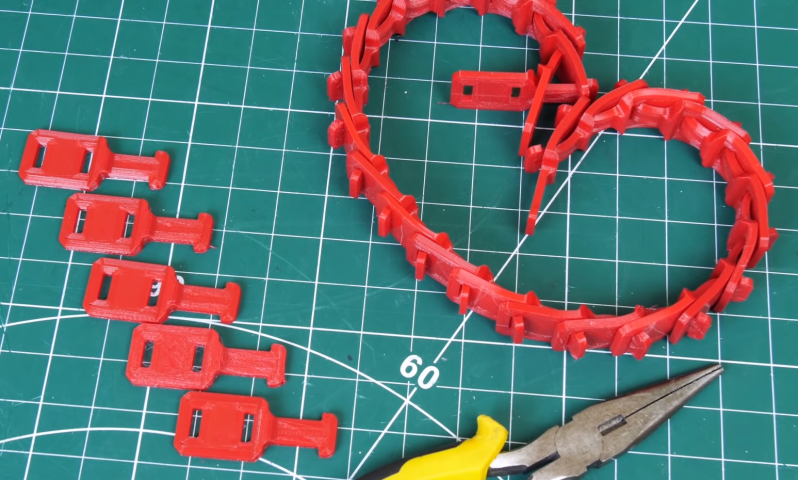
The track sections are printed with flexible Ninjaflex filament. Each section has a tab designed to slot through two neighboring pieces. The ends of the tabs stick through on the inside of the track fit into slots on the drive wheel like gear teeth. This prevents the track from slipping under load. The Ninjaflex is almost too flexible, allowing the tracks to stretch and almost climb off the wheels, so [James] plans to experiment with some other materials in the future. The chassis consists of two 2020 T-slot extrusions, which allows convenient mounting of the wheel bogies and other components.
For initial driving tests [James] fitted two completely overpowered 1500 W brushless motors that he had on hand, which he plans to replace with smaller geared DC motors at a later stage.
A standard RC system is used for control, but it does not offer a simple way to control a skid steer vehicle. To solve this, [James] added an Arduino between the RC receiver and the motor ESC. It converts the PWM throttle and turn signal from the transmitter, and combines is into differential PWM outputs for the two ESCs.
Continue reading “Modular Rover Platform Rolls On 3D Printed Flexible Tank Tracks”









