If you’ve ever tried to use GPS indoors, you know that the signals aren’t easy to acquire in any sort of structure. Now imagine trying to get a satellite fix underwater. Researchers at MIT have a new technique, underwater backscatter localization or UBL, that promises to provide a low-power localization system tailored for the subsea environment.
Like other existing solutions, UBL uses sound waves, but it avoids some of the common problems with using sonic beacons in that environment. A typical system has a fixed beacon constrained by the availability of power or battery-operated beacons that require replacement or recharging. Since the beacon acts as a transponder — it receives a signal and then replies — it requires either constant power or time to wake up from the external stimulus and that time typically varies with the environment. That variable startup time interferes with computing the round-trip time of the signal, which is crucial for estimating position.
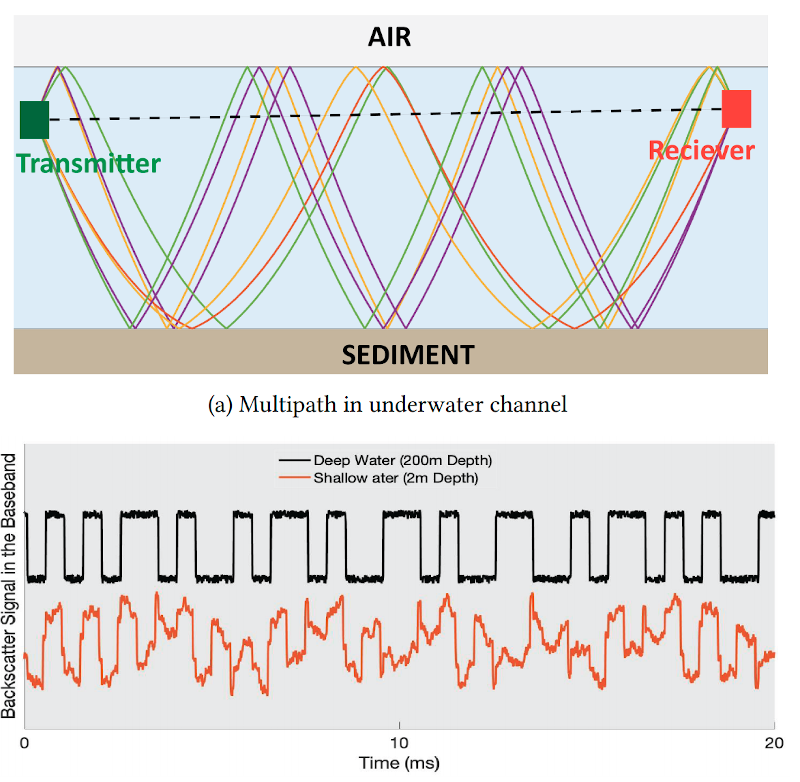
A UBL reader pings for nodes and, when a node replies, the pair change frequencies in a hopping scheme that allows measurement at many different frequencies. This allows an estimate of the true propagation time that is more accurate in the presence of reflections of the signal on the seabed, the water’s surface, and other elements of the environment. The speed of the communications between the node and the reader can also alter to tradeoff between multipath rejection and better ability to locate objects in motion.
Like traditional navigation or even GPS, knowing how much delay there is between you and a fixed position allows you to draw a circle around that position and you know you are somewhere on that circle. Find two fixed positions and you must be at one of the points where the two circles overlap. With three fixed positions that are far enough apart, you’ll have only one point where all three circles intersect. Finding fixed positions could use a star, a GPS satellite, or, in this case, an acoustic signal. The principle is the same.
We’ve looked at finding submarines before which is a similar problem. Another solution to the variable delay time is to not look at the transit time, but the difference between arrival times at two different points.














I guess we aren’t done blasting the ears of aquatic life yet?
yep indeed, except now we’re going to make a cheap gadget so that thousands of clueless humans can turn the aquatic environments into living hell at a flick of a switch…. and flood the landfills with even more garbage when the new models hit the stores. Great
Are you kidding? They will just toss it in the sea, to add to the accumulation of plastic and human detritus.
This was probably tested at ICEX 2020. See Smart Every Day’s video about boarding a nuclear submarine.
Ariel can finally locate where she is.
Jesus christ haven’t we made it noisy enough down there. What idiots came up with this idea.
Acoustic beacons have been around for many years and were used widely in seep sea areas where other position methods did not work. In terms of noise, I don’t know how much they put out, but I am pretty sure it is a magnitude less than active sonar.
How can one tell if a sea is seeping?
“Finding fixed positions could use a star, a GPS satellite, or, in this case, an acoustic signal. The principle is the same.”
Uh, no, not at all the same principles. Finding position by starfinding, by GPS and by active sonar each require very different strategies (measurement of angles, timing receipt of radio signals, and active transmission & reception of sonar signals respectively).
The method described here is a sonar analog to aircraft radar DME (Distance Measuring Equipment), with the added frequency diversity multipath mitigation strategy.
I wish they would just hurry up and actually make those quantum gyroscopes that you can apparently dead reckon with. No noise pollution, no beacons for the enemy to damage, and Google maps would stop pointing me in the wrong place around buildings.
Aren’t Fiber ring gyros + similiar accelerometers not enough? I tought that a jetliner can fly half the world using only deadreckoning with just a few meters error and that ICBM can do that without any external inputs (no pitot tube, no compass, no terrain/stars tracking camera).
TOF for an ICBM is ~30 mins, for a passenger jet < 14 hours, so drift isn't too much of an issue. Plus jet aircraft use GPS. Nuclear submarines stay underwater for many weeks on end, so drift does become an issue.
Oh man this is going to make my starfish pucker!
Is it going to make your tubeworm twitch?
A whale whine?
A shark shake?
An eel reel?
A ray stray?
A coelacanth (something)?
This is a terrible idea. There’s just so much aquatic life that depends on echolocation and other types of audio perception. The potential harmful effects on the flora and fauna need to be taken into consideration.
Acoustic beacons have been used for many years, especially in deepwater locations. They do not give any power figures in the whitepaper, but since they are looking at low power applications you would assume that the noise given out is quite low compared to legacy beacons. The use if frequency hopping to reduce disruption would again reduce the power needed.
I think the problem her is that there is confusion over acoustic location, which is quite localized and active sonar, which is high power and designed for long range detection. In many ways this system could be better for the environment, replacing older, nosier kit
Maybe they’re really looking for a way of making cheaper sushi?