One of the major choices a newcomer to the RC flying hobby must make is on the RC link protocol. To add the list of choices (or confusion) there is now a new open-source, low latency, and long-range protocol named ExpressLRS.
ExpressLRS’s claim to fame is high packet rates of up to 500 Hz, with plans for 1000 Hz, and latency as low as 5 ms. Long-range testing has pushed it out to 30 km with a flying wing (video below), but this is not unheard of for other protocols. Most modern RC protocols run either in the 2.4 GHz or 915/868 MHz bands, with the latter having a definite advantage in terms of range.
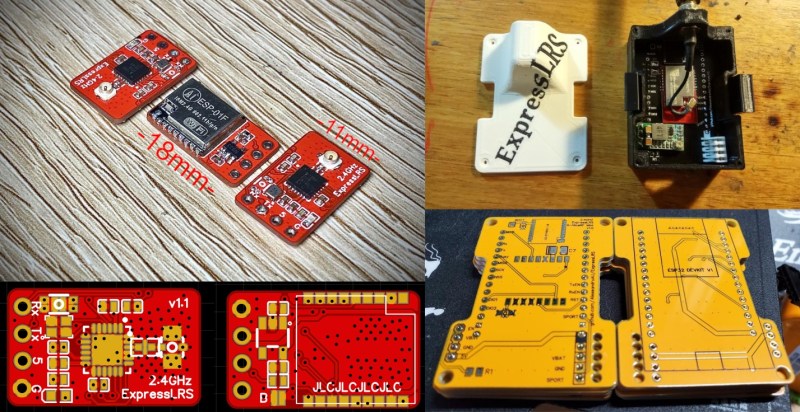
ExpressLRS has options to run on either band, using Semtech SX127x (915/868 MHz) or SX1280 (2.4 GHz) LoRa transceivers, connected to STM32, ESP32, or ESP8285 microcontrollers. The ESP microcontrollers also allow software updates over Wi-Fi.
We’re excited to see an open-source competitor to the proprietary protocols currently dominating the market, but several open-source protocols have come and gone over the years. Hardware availability and compatibility is a deciding factor for a new protocol’s success, and ExpressLRS already has an advantage in this regard. Existing Frsky R9 transmitters and receivers, and Immersion RC Ghost receivers are compatible with the firmware. There are also DIY options available, and the GitHub page claims that several manufacturers are working on official ExpressLRS hardware.
If you’re already into the RC hobby, and you have compatible hardware lying around, be sure to give it a try and give some feedback to the developers! One scenario we would like to see tested is high interference and congested band conditions, like at RC flying events.
All the source code and hardware designs are available on GitHub, and there are active community discussions on Discord.
https://www.youtube.com/watch?v=SbWvFIpVkto
Thanks for the tip [Jye]!














If you are interested in something similar but cheaper, look for qczek lrs.
Not sure why/how qczek lrs would be cheaper.
(Full disclaimer, I’ve been using eLRS for a few weeks now)
I’ve built 10 “mini” RX (900) for < 9 EUR a piece materials. Jumper R900 (compatible RX) can be had for 10 USD, although you can only flash them via pins on the chip and the antennas are badly tuned.
frsky R9 gear can also be had for cheap as well. New as well as used.
(And I personally find the qczek lrs "documentation" rather lacking or none existant. Please link it, maybe I'm just unable to use google)
ExpressLRS can run on a lot of hardware, qczek isn’t cheaper in any way.
Why are we promoting videos from people who have some kind of sociopathic need to fly these over populations, on a TEST no less, not even well proven hardware.
I’m with you ;)
Although, “worst case”, the Flight Controller would have sent the model safely home. Also, this isn’t a test, except for the range capability.
Sorry, did you think before you sought out to say that? First of all, ofcourse this is not the first test of the firmware or hardware, by any stretch of the imagination. Secondly, everyone who flies long range, flies with a GPS. If the signal is lost for any reason, the craft will RTL/RTH. And having a GPS fail is less likely than the ESC failing, or flight controller giving up the ghost, they are built to higher standards compared to most ESC’s.
There’s a lot of safety things involved like GPS rescue etc, And ExpressLRS is quite well-proven at this point. Wez is not at all sociopathic or anything and has helped develop ExpressLRS.
Maybe because it is not easy to find 20 Km of nothing near a geek. And also because it might be pretty hard to hit someone right.on the first try.
Oh no, not a small foam airplane
Yes, we learned it was a bad idea on even small foam airplanes years ago, which are built of compressible foam and have a failover glide mode if the motor quits. Machines built with harder bits, which are strapped to an incendiary and have a failover mode of falling brick should not do it either. We tried dropping clues, we tried spelling it out, now it’s time to call it a callous disregard for public safety, because it is.
Having skimmed the video doesn’t look like they fly over anything much populated. Even if it was a miracle ‘flying’ lead brick if it failed its about as likely on that flight path to hit anything human made as winning a lottery it seems to me.. so actually hitting a person….
As its not infact a lead brick, but something that will glide and doesn’t weigh all that much even if it does hit the old person with their hugely brittle bones it probably won’t cause them much harm – The top speed it was showing while under power and a reasonable guess at its weight says the impact energy is more like an escaped football, the sort of thing nobody even remotely thinks of complaining about..
In Short Sorry RW, but this time I think you are rather off the mark – this is about as safe as it can be. If they are buzzing the busy road, flying through a city etc you’d have a point, but not being out near enough in the middle of nowhere skirting the human areas. And while flying something that even with a deliberate attempt to dive into a human as fast as possible isn’t likely to do more than startle and bruise with perhaps some nasty cuts from the prop (yes model aircraft props can be really bloody dangerous but this thing doesn’t look like it really falls into that category, and even if does actually hitting something with the prop while the motor is at full tilt by accident/failure is almost impossible levels unlikely on that flight)
Either nobody does it, or everybody can do it, including quarter scale hard resin and glass monsters with a chainsaw motor and a kid that doesn’t know crap at the controls.
By that argument RW I have to confiscate all your electronic equipment, it could be used to harm others! Oh and any motor vehicles in your possession older than 2 weeks – they might have had anything done to them since they left the factory, so have lost the rubber stamp for safety!
While there does need to be enforceable regulations, and common sense applied by the fliers lets not go too far. Its a perfectly safe hobby done right, and far from the most dangerous to yourself or others done wrong.. And this flight may not be legal where you are, but its done perfectly safely as far as we can tell.
who is we? and is your name Karen?
Looks like it’s in Australia mate, loads of space and more chance of being bitten by a snake.
I wasn’t going to bother watching the video, but it took about 4 and a half minutes to get above the first group of houses, and he’s aimed for the edge of the town.
I find it interesting to see the (valid) concerns of people who see this as overly dangerous or reckless. I guess we all interact and endanger one another simply by our interactions and daily activities, and no doubt, the sum of the individual risks we encounter will define our total injury potential. I know this because I am so good at YATZEE and have learned to calculate odds. That having been said, and I do say this with respect towards the concerns, I feel like the invisible risk of driving head on into litterally hundreds of cars ever day, separated only by a visual marker on the roadway that both parties have to agree to observe and respect far outways any risk to physical harm posed by this guy’s actions. That may change as the skies are flooded with wings on long-distance flight missions, but for now I will choose to concern myself with the guy in the F150 comming at me on the country road and how his day has gone up until now.
> Long-range testing has pushed it out to 30 km
> …
>If you’re already into the RC hobby, and you have compatible hardware lying around, be sure to give it a try
Legally flying BVLOS (at least in the US) puts your R/C aircraft out of the “hobby” realm.
You can request a waiver from the FAA. I’m not sure how often the waivers are requested or how often Joe YouTuber has one when he shows you his insane footage. There is a compelling public interest to developing this capability safely for use in search and rescue, environmental research/monitoring, etc. (and also for cool footage)
Same in EU. Btw. we’ve recently got UAS laws overhaul and now they are (or going to be) unified across the nations. What surprised me is that
– Exam and registration is necessary over 250g crafts but the registration is per pilot, not per craft.
– DIY has not been outlawed
– FPV has been allowed with a spotter/copilot keeping VLOS. This is a change from many previous national laws.
BVLOS is however still verbotten without going through many byrocratic ordeals and risk assessments as far as i understood.
BVLOS flight is legal in Transnistria (and probably in Ukraine too).
Even for LOS eLRS beats most control links in terms of performance and reliability.
I’ve been able to fly lower/closer/etc to objects (trees, gaps, etc) that I wouldn’t have been able to do with frsky D8, because of the so called micro failsafes (where your control link drops out for split seconds).
While the chipsets mentioned are capable of more than LoRA, if this relies on LoRA,it’s completely proprietary, so hardly ‘open’
Wow so linux is not open either because it also relies on proprietary hardware.
Yeah go ahead and find a mass storage device, capable of supporting a Linux system, that isn’t completely proprietary. Can’t run without one!
Raw NAND Flash connected through a FPGA, but it would be more practical to use the FPGA to perform hardware based encryption and integrity checking on “untrustworthy” storage media.
It’s not quite the same, because Linux runs on just about anything from many different choices of proprietary hardware, but LoRa is only licensed to a few companies, and seems to cost more than other RF tech.
Actually it is exactly the same. Intel only license their CPU designs to a few companies and they seem to cost more than other CPU tech.
Linux also runs on ARM and RISC-V.
How many companies make flash controller chips? Again can’t have a Linux system without one.
Heaven forbid someone develop technology and actually want to get paid for it. Yes, I love open source, yes I use it. I also use and respect proprietary because developing hardware and software costs money and is hard. If someone wants to get paid for their work and effort fair play to them. If I use it, i’ll pay for it.
In this case it seems like the LoRA radio is an enabler for the technology. Old mate here has taken an off-the-shelf radio chipset designed for long-range communication, and built upon it a rather nice piece of software that leverages quite a few different MCUs and Radio Chipsets. He’s got the code out in public on Github.
By that logic ANY piece of open source software (as X said Linux) is not open because Intel, AMD, ARM, etc don’t release the designs for their processors.
How far can a quad fly before needing a battery recharge?
I’m guessing the test was using a fixed wing.
Very much depends on the model.
(small) Race Quads (typically 5″ propellers) that are optimized for being lightweight and fast, usually will only fly 5-10 minutes.
With a bigger quadcopter you can use bigger props, motors, and more battery allowing for longer flight times, easily 20+ minutes even on a cheaper/simpler build.
Fixed wing on the other hand can quite easily reach 30+ minutes flight time.
How far you can get in that flight time depends :)
I don’t know if they’re particularly popular now, but combustion engine equipped fixed-wing planes can even have onboard permanent magnet generators mounted behind the prop spinner.
At that point, your only limitation is the fuel capacity.
Or if you have the slope to soar I understand you can stay up basically a whole day one one battery with ease. Too many variables to really give a flight time/distance for fixed wings with any degree of accuracy.
Multi rotors on the other hand really hit the rocket equation – more fuel = more mass = needing more fuel. So a flight time with one of those is damn impressive if its over 30 mins..
Are you sure? Raw nand is not really mass storage I suppose, so it kind of depends how you dine mass storage ..
Spi-nor really is to small, rmmc comes with a controller indeed, nvme, data, ide obviously are out… Leaves us with either raw band (a few gigabyte are possible, 8 – 16 for sure) or USB, where we take the nand and make the controller our selves …
So I do think its def. Possible, just not fst (raw nand is still relatively slow) …
Well done AlessandroAU and Jye Smith for leading the creation on a great product!
I shouldn’t have to point out that foam planes are incendiary devices themselves. Foam is literally just long chain carbohydrates.
Are you telling me that video was sent over a LoRa radio? Aren’t data rates offered by LoRa too low for that?
The video is on a different channel and technology.
The RC link runs with LoRa.
I wonder if this would work well for long range audio.
the packet size and data rate may be lacking for audio purposes. I have been looking into making a mesh two way text setup for my children so they can communicate with me , but not be addicted to a phone. LORA can push data just fine but even short audio packets seem to be a lot more work.