We live in a time where our phones have computing power that would have been the envy of NASA a few decades ago. So, in theory, we should be able to simulate just about anything. Thanks to [rhoban], robots you design in OnShape — a popular CAD tool — are now easier to simulate using several common simulation tools.
Electronic circuits are pretty easy to simulate, because we typically draw schematics and circuit simulators can capture those schematics readily. But simulating physics for robotic designs is a bit trickier. Gazebo and Pybullet both can use SDF files or URDF. However, building those files is often a separate process from actual physical design even though you probably did the design using a CAD tool. Even if you don’t use OnShape, you can probably import your preferred format and then bridge to the simulation file format without having to manually recreate your design. You can see the author walk through the process in the video below.
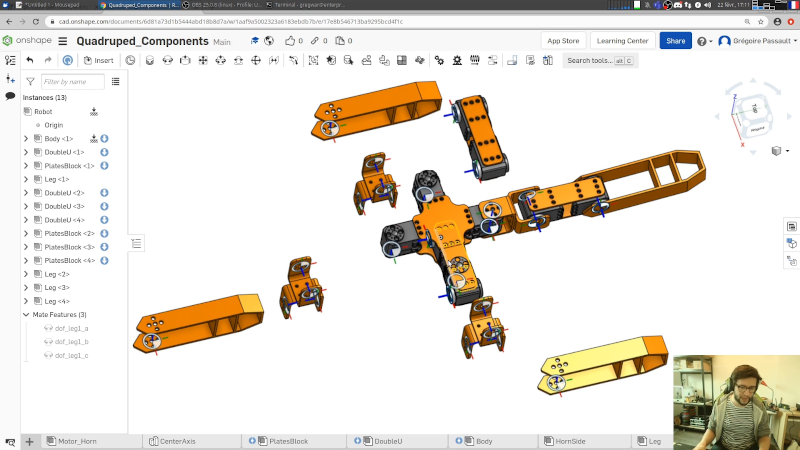
The program does use the OnShape API, so you’ll need a key for that. The example quadruped looks like a cool design. Once you have the design in the right format, you can use multiple tools to work with it from a simulation perspective.
We’ve seen URDF exports for SolidWorks before. If you want a chance to play with Pybullet, try Boston Dynamic’s Spot robot.














where is my home robot, why i cant buy it for 500$?
simple robot for bring my stuff, turn on my coffe, tea or increase haizung
Does anyone know of working gazebo models that use an articulated humanoid “robot” (valkyrie?) where simulation feeds (camera, sensor) data into robot operating system, as if it had come from a real environment, and allows for simulated articulated limbs to respond to ROS output?
Thanks!
I’d like to start with a BB-8 clone that’s based on a dodecahedron. While most of the surface is rounded to allow rolling, one “face” is flat to make it easier for the robot to sit in one place (and recharge wireless).
There is no need to round the corners.
Even Cubli can roll around just fine:
https://www.youtube.com/watch?v=n_6p-1J551Y
Until there is broad based hexahedral meshing for arbitrary geometries, simulation will be held back by too many DOFs that aren’t needed and waste time. Days in some cases. You can’t say your simulation is valid if you don’t know the residuals. If you don’t know what residuals are, you shouldn’t be taking all results seriously. Damping in mechanical simulation is very challenging. Where does your damping data come from? Is it valid? Assumed? Just some general questions often overlooked.
Nice integration with Onshape and a good job explaining how to extract data to bullet.
I often tell the story about the time while a computer operator in a pre-production computer room that they dedicated a mainframe full-time for several months for A programmer to create a 3-axis CNC program. (maybe it was more axis) I mean FULL-time. He was there 10 to 12 hours a day and since it was a secret facility we had to have at least 2 staff in the room at all times. Lots of overtime$$$
When he had the demonstration ready, about 6 high up suits showed up to watch a 3D graphic spin on the screen. Yeah, like the 3D screen saver.
That was in about 1987. It was to machine parts for the B-2. Yup, the one they lost the plans for.
Side Note: The local school district’s career center machine shop has two or three of those in it with high school kids learning how to use them.
And that facility got one of the first TeraData 1TB disk storage units. 3′ x 3′ x 20′. Probably cost around a million and took 3 of THEIR engineers and a couple of our System Programmers several weeks to install and get into production.
Last I saw, you could buy a 12TB hard drive at Staples for
$350$220, take it home and plug it in.Amazing what has changed in my lifetime.