While early scientists and inventors famously underestimated the value of radar, through the lens of history we can see how useful it became. Even though radar uses electromagnetic waves to detect objects, the same principle has been used with other propagating waves, most often sound waves. While a well-known use of this is sonar, ultrasonic sensors can also be put to use to make a radar-like system.
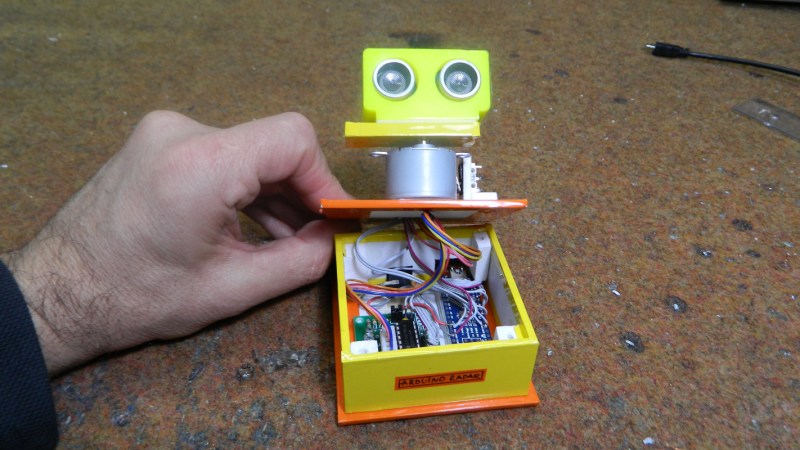
This ultrasonic radar project is from [mircemk] who uses a small ultrasonic distance sensor attached to a rotating platform. A motor rotates it around a 180-degree field-of-view and an Arduino takes and records measurements during its trip. It interfaces with an application running on a computer which shows the data in real-time and maps out the location of all of the objects around the sensor. With some upgrades to the code, [mircemk] is also able to extrapolate objects hidden behind other objects as well.
While the ultrasonic sensor used in this project has a range of about a meter, there’s no reason that this principle couldn’t be used for other range-finding devices to extend its working distance. The project is similar to others we’ve seen occasionally before, but the upgrade to the software to allow it to “see” around solid objects is an equally solid upgrade.














I made a similar project a few years back but couldn’t get any useful data due to the propensity of everyday objects to attenuate and scatter ultrasound.
Regarding the Radar comparison surely Sonar is a better fit?
Should it not also be possible without rotating the USC using reflected phase?
Probably, but this is a simple project with an EUR2 stepper motor and an EUR3 ultrasonic detector.
If you want to do this with reflected phase, then you need a whole array of sensors, better amplification of the return signal (for each sensor) and a lot more math on a beefy microcontroller to make sense of it all.
I am surprised about the short range. Range is very much dependent on the size and the material of the object. Hard objects such as a steel frying pan can be detected from greater distances then fluffy objects such as woolen sweater.
But several meters should be doable with these sensors. A possible cause is that vibrations introduced by the steppermotor interfere with the receiver and reduce it’s sensitivity. However, in that case I would also expect lots of false readings. Does range improve when the motor is stationary?
this working inside ground too?
For large scale geology they do something similar, usually setting off an explosive charge and analyzing the shock waves bouncing off features under the ground.
For something small, it would depend on ground composition, and would likely be limited in range/effectiveness. Ultrasound can be used to image inside concrete, but the more voids in the material, the less effective the results. For “seeing” underground (e.g. see buried things, pipes, treasure, lost cities,etc) the current preferred way is Ground Penetrating Radar.
“For large scale geology they do something similar, usually setting off an explosive charge and analyzing the shock waves bouncing off features under the ground.”
But in most of those cases, it is infrasonic.
FFT makes miracles but would it be first choice to remove “hidden” object after one swip of “radar” as a proof of concept?
Blue dots trace could be echos, phase shifts, ghosts…
Sonar is not RADAR, it’s SONAR. RADAR has radio waves, SONAR sound waves.
SODAR is not SONAR, it’s SODAR, SONAR is for navigation and ranging, SODAR is for detection and ranging.
Isn’t that the island where Thomas the Tank Engine runs?
Years ago, my father was teaching me mechanics. He was the local mechanic for our farming area, while he never had any school training in the topic, I don’t even know if they offered such training in the 1920’s when he was in school, but he knew his stuff. He could grind the valves, replace the rings and pistons if needed, tune the engine, do a carb job, work on breaks and fix the generators (the Alternator had not yet been standardized at that time!) So as he was teaching me his trade he emphasized one important thing. “You MUST be smarter then the damn screwdriver!” When you think about it, it makes sense. He always stressed common sense in all steps of life, and the Golden Rule! While dad was not a strong Christian, he was a very good man and would give you the shirt off his back if you were in need. It used to anger my mother greatly that the local Indians from around the area would stop by the farm from time to time and ask dad for money, or perhaps sell him their watch or jacket for the money they needed for what ever it was they were seeking at the time. Mom always said they were begging for money to get drunk on, but dad would reply that perhaps they were hungry, and he would never send anyone away from his doorstep who was in need without at least enough money to buy some food for their family. When I come to this site, it is almost like one of those local Indians I come here seeking food for my brain, they always send me away with enough information to get me back on the straight and narrow helping me with the project I am attempting to build. Please keep the Golden Rule in the front of your mind, this was the message I gave to all the officers who were under my command when I served as Chief Of Police years ago, and I still offer that advice to my grandsons, now in their teen years. They are coming to visit Grandpa for Easter tonight, I do look forward to their visit, I have not seen them since Christmas, they live sure across the State from me now, and with this damn virus crap their visits are becoming fewer and fewer.
Interesting. I was hoping it would be a substitute for ground penetrating radar but no such luck. If anyone has a diy version of that, please do share!
The most interesting thing about this hack is the soldering and breaking out of the ‘raw echo’ pin on the ultrasonic module. It is misleading to say it can detect objects ‘hidden’ behind other objects, it is perhaps more accurate to say that you can listen for a second echo after the first is received which can give information about a further object further away.
In radar, that is known as “second trip”.