When automating almost any moderately complex mechanical task, the actuators and drive electronics can get expensive quickly. Rather than using an actuator for every motion, mechanical multiplexing might be an option. [James Bruton] has considered using it in some of his many robotics projects, so he built a prioritizing mechanical multiplexer to demonstrate the concept.
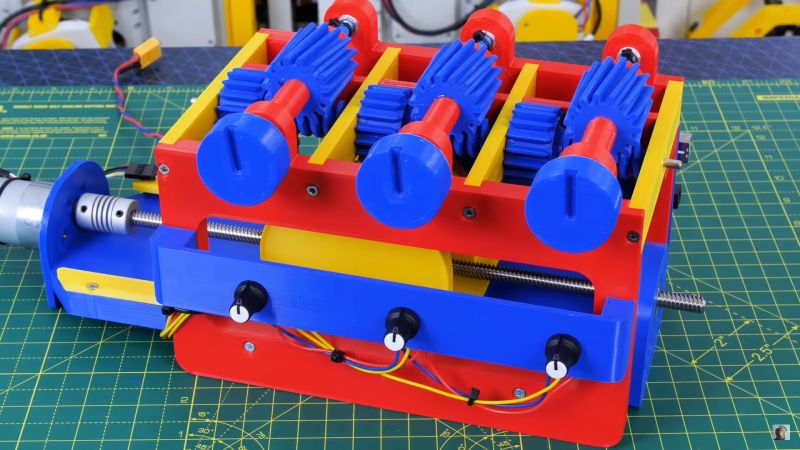
The basic idea is to have a single actuator and dynamically switch between different outputs. For his demonstration, [James] used a motor mounted on a moving platform actuated by a lead screw that can engage a number of different output gears. Each output turns a dial, and the goal is to match the position of the dial to the position of a potentiometer. The “prioritizing” part comes in where a number of outputs need to be adjusted, and the system must choose which to do first. This quickly turns into a task scheduling problem, since there are a number of factors that can be used to determine the priority. See the video after the break to see different algorithms in action.
Instead of moving the actuator, all the outputs can connect to a single main shaft via clutches as required. Possible use cases for mechanical multiplexers include dispensing machines and production line automation. Apparently, the Armatron robotic arm sold by Radioshack in the ’80s used a similar system, controlling all its functions with a single motor.
[James] knows or two about robotics, having built many of them over the last few years. Just take a look at OpenDog and his Start Wars robots.














This is incredibly awesome, but I have my doubts from a cost saving perspective, because mechanical stuff makes assembly and repair harder, and is usually the thing that wears out.
I think the most important thing is to reduce the amount of mechanical power needed in the first place by any means necessary, sharper blades, lighter items, better bearings, looser tolerances and more digital compensation, solid state stuff if possible.
But I can see this multiplexing approach being extremely cool for pneumatics. Imagine being able to control dozens of valves connected to cheap pistons in arbitrary places. You might not be able to move fast, but you could do complex sequences cheaply and reliably.
There are complex cam driven clockwork automata that have kept running for hundreds of years. However, your are correct in that most modern equipment is servo based, as each part’s behavior can be adjusted in software as the machine wears. In some ways modern machines have become much less complicated. =)
https://www.youtube.com/watch?v=q8L3Iydv3AY
That calligraphy automaton has better writing skills than the robot arm I built in robot class, and it doesn’t even have any electronics!
> This is incredibly awesome, but I have my doubts from a cost saving perspective, because mechanical stuff makes assembly and repair harder, and is usually the thing that wears out.
Sounds like a perfect design for a business that wants to churn out thousands and ensure their customers come back for the “upgraded” model in a few years time when the old one keels over.
Two [James Bruton] hacks almost back to back. This must be a HaD first, right?
Two motors and lots of gears/3D printed parts to replace 3 motors…
Yeah, and he didn’t even use a 555, amirite?
Go away, Debbie Downer.
This is a demo. You could drive a lot more than 3 outputs, as stated in the video. For instance, you’d still only need 2 motors for 10 outputs, in which case it is definitely effective.
Reminds me of the Tomy/RadioShack Armatron.
Great Minds! Came to drop this paper on the armatron https://openlab.citytech.cuny.edu/grahman-eportfolio/files/2017/02/The-Armatron.pdf
Great Minds! Came here to say the same and drop a link http://www.jeff-z.com/pinball/toys/armatron/armatron.html
I’m thinking a cam-controlled clutch, engaging-gears, or differentials-and-brakes system would be faster to switch where the power is sent.
And then the drive motor doesn’t need to move anymore.
No worries about managing the flexible wires going to the drive motor.
Just spin the camshaft to select which output to engage and which to lock in place.
My thought was that manual transmissions essentially select a pair of gears to pull power from. Instead of all the output gears connecting to a single output shaft, they connect to those gears turning the output 90 degrees. Such a system also has the potential to drive multiple outputs simultaneously as long as the drive motor can handle the load.
Many of Lego’s recent big Technic models have taken this approach: one motor runs continuously, and a complex gear chain distributes it according to the setting of various levers.
This reminds me of my daughter’s toy I was just recently fixing. It was a “walking dog” with moving legs, head and tail, all driven by a single DC motor set to run continuously.
The interesting thing was that it had three repeating phases of motion: “walk forward”, “walk backwards” and “bark while wagging the tail”. ALL of this driven by a single motor and a complex gearbox. I guess it’s cheaper than adding another motor when you make thousands of units, and you are certain that you won’t need to alter the movement sequence.
I believe the chumby is also driven by a single motor and it has a number of different movements.
Somewhere in the ’70-ies there was a plastic toy robot arm which was also driven by a single motor and it had joysticks to manually make gear selectrions to drive all the different joints. I believe that arm was plagued by too cheap materials and sloppy tolerances.
“[James] knows or two”
The HaD staff and editors need some vacations.