
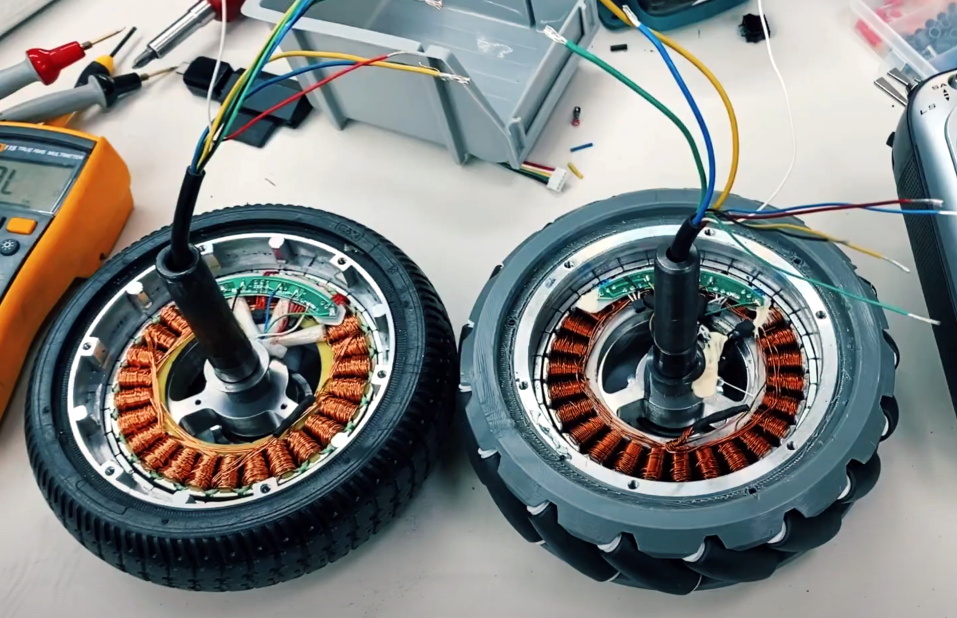
At this point, somebody taking the motors out of a cheap “hoverboard” and using them to power a scooter or remote controlled vehicle isn’t exactly a new idea. But in the case of the FPV rover [Proto G] has been working on, his choice of motors is only part of the story. The real interesting bit is the 3D printed omnidirectional Mecanum wheels he’s designed to fit the motors, which he thinks could have far reaching applications beyond his own project.
 Now, that isn’t to say that the rover itself isn’t impressive. All of the laser cutting and sheet metal bending was done personally by [Proto G], and we love the elevated GoPro “turret” in the front that lets him look around while remotely driving the vehicle. Powered by a pair of Makita cordless tool batteries and utilizing hobby-grade RC parts, the rover looks like it would be a fantastic robotic platform to base further development on.
Now, that isn’t to say that the rover itself isn’t impressive. All of the laser cutting and sheet metal bending was done personally by [Proto G], and we love the elevated GoPro “turret” in the front that lets him look around while remotely driving the vehicle. Powered by a pair of Makita cordless tool batteries and utilizing hobby-grade RC parts, the rover looks like it would be a fantastic robotic platform to base further development on.
The Mecanum wheels themselves are two pieces, and make use of rollers pulled from far smaller commercially available wheels. This is perhaps not the most cost effective approach, but compared to the alternative of trying to print all the rollers, we see the advantage of using something off-the-shelf. If you’re not sure how to make these weird wheels work for you, [Proto G] has also released a video explaining how he mixes the RC channels to get the desired omnidirectional movement from the vehicle.
If you’re content with more traditional wheeled locomotion, we’ve previously seen how quickly a couple of second-hand hoverboards can be turned into a impressively powerful mobile platform for whatever diabolical plans you may have.














Got me wondering where I can get some of those motors to try to make a small windmill.
You can get hoverboard hub motors for very cheap off ebay
How cheap is cheap? I’m seeing ~$30 at the very lowest, is there a search keyword I’m missing?
I bought a dead hoverboard on Craigslist for $20. That got me motors and aluminum mounting brackets. The battery was dead and the board was crap – I bought a new board for about $30 on eBay and I’m using an entirely different battery (an electric lawnmower battery that’s 3x 12V batteries in a box)
Windmill? Got some oats to grind?
Loving the
Makita color theme continued on the wheels and covers
There’s a Cool project by AustinTronics on youtube. He’s working on building a robot dog using these motors.
https://www.youtube.com/channel/UCcF1FVllWmtUZAolnE3eoQA
It was this channel that first put using these motors for other applications on my radar.
Have you got the code and part list and schematic for this great project, I am looking to build something like this, also looking to build a 6 wheeled version.
Are you using Arduino nanos for each motor.
Mike