[Skyentific] is looking to push the hobbyist robotics state of the art. Motors and their gears, the actuators, are typically the most expensive part. For his build, he realised he needed big servos capable of delivering plenty of torque. Thus, he set about creating a 3D-printed design to get the job done on a budget. (Video, embedded below.)
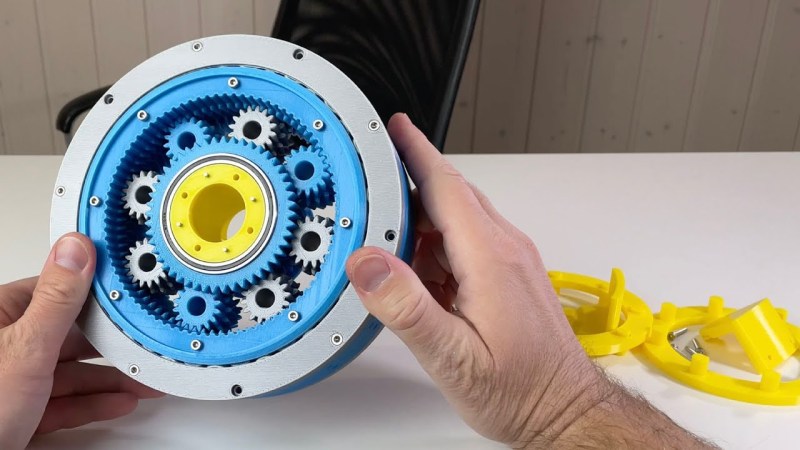
Stepper motors are the order of the day here, chosen for their low cost compared to brushless solutions, particularly when taking control hardware into account. In this design, the stepper motor drives a sun gear as part of a bigger planetary gearbox with a high gear ratio. Cross-roller bearings are used to allow the servo to effectively handle both radial and axial loads. The servo as a whole is designed to fit neatly into the joints of the robot arm itself, and has external mounting points provisioned as such.
It’s a neat servo that somewhat apes those used on full-sized industrial designs, at least in the sense of being an integrated part of the joints of a robot arm. It also comes in at a relatively-cheap $32 based on the materials used by [Skyentific].
We’ve seen some related work from [Skyentific] before, too – like this interesting cable-driven joint. Video after the break.














It’s not a servo, it’s a planetary gearbox. A servo is a servo because of the closed loop between the actuator and the controller. Steppers are open loop, so not a servo.
A stepper can be closed loop. Just put the right controller and feedback mechanism on it. There’s plenty of use for servo-steppers/stepper-servo’s.
This particular mechanism in the video does appear to be only a simple open-loop 4 wire stepper, so not a servo.
Yes, thay can be but almost never are. Vexta makes the alphastep motors and they are fine but just limited resolution compared to modern servos by the big names like Mitsubishi and Yaskawa, latest gen comes standard with 21bit encoders I believe. I using some Yaskawa Sigma 5 servos to upgrade a larger CNC router as we speak.
Steppers kinda suck as a servo compared to brushed or brushless motors. Once they slip its harder for them to reengage and there are issues with resonances plus low torque at high speed.
He seems quite passionate about the subject and the video edit is nice – not too long, not too short on details. Looks quite involved. Waiting for the final robot arm to be built.
Blaise Pascal famously said on his YouTube channel, “I would have produced a shorter video, but I did not have the time.” That’s a bit of a joke but you know an hour long video took an hour to make but a 10 minute video will take many hours.
“Stepper motors are the order of the day here, chosen for their low cost compared to brushless solutions, particularly when taking control hardware into account.”
stepper motors *are* brushless :) as i understand it they’re effectively just much lower RPM than typical. i don’t know if that really simplifies control that much or not, but i won’t argue with someone who says they find steppers easier to work with.
you are uselessly correct here. Brushless (Colloquial) is almost always used to mean a 3-phase 120 degree-magnetic Wye (Y) or Delta-wired permag motor. Stepper (technical or Colloquial) refers to either 2 electrically-separated phases (bipolar) or 4 center-shared phases (unipolar) 90 degree-magnetic apart. they may share the most-technical aspect of being ‘brushless’, but they are not interchangeable to driver circuitry.
I think in theory you could drive a normal brushless motor open-loop, like a stepper, but it wouldn’t work very well. You might run into heat problems, for example. In practice, people always run them closed-loop, which for a robot means expensive encoders.
not necessarily expensive. you could make something on the cheap.
And it’s all behind a pay wall. No thanks