
With high-altitude ballooning, you are at the mercy of the winds, which can move your payload hundreds of kilometers and deposit it in some inaccessible spot. To solve this [Yohan Hadji] created R2Home, an autonomous parachute-based recovery system that can fly a payload to any specified landing site within its gliding range.
We first covered R2Home at the start of 2021, when he was still in the early experimental phases, but the project has matured massively since then. It just completed its longest and highest test flight. Descending autonomously from a release altitude of 3500 m, with an additional radiosonde payload, it landed within 5 m of the launch point.
R2Home can fly using a variety of steerable canopies, even a DIY ram-air parachute, as demonstrated in an earlier version. [Yohan] is currently using a high-performance wing for RC paragliders.
A lot of effort went into developing a reliable parachute deployment system. The main canopy is packed carefully in a custom “Dbag”, which is attached to a drogue chute to stabilize the system during free-fall and deploy the main canopy at a preset altitude. This is done with a servo operated release mechanism, while steering is handled by a pair of modified winch servos intended for RC sailboats.
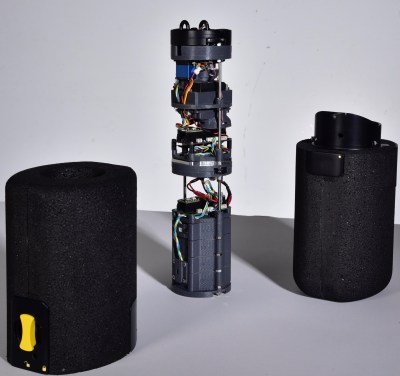
All the electronics are mounted on a stack of circular 3D printed brackets which fit in a tubular housing, bolted together with threaded rods. With the help of a design student [Yohan] also upgraded the simple tube housing to a lockable, foam-insulated design to help it handle temperatures at high altitudes.
The flight main flight computer is a Teensy 4.1 plugged into a custom PCB to connect all the navigation, communication, and flight systems. The custom Arduino-based autopilot takes inputs from a GPS receiver, and pilots the system to the desired drop zone, which it circles until touchdown.
The entire project is extremely well documented, and all the design files and code are open source and available on Github.














This is really cool. You can hopefully keep your payloads from ending up in trees, highways, etc. It seems to make more sense than casting your lots to the wind and seeing where it ends up.
Having been chasing radiosondes lately (s/o to Sondehub for making it so easy!), it’d be stunning if they could each contain a database of safe landing spots (parks, golf courses, parking lots), and pick an easy one on the way down. This would increase the price of the sonde, but also greatly increase the recover-and-refly rate.
Given that each one now seems to contain an STM32, maybe they’re worth recovering!
They’re so cheap that they are considered to be disposable.
Not all of them are so cheap :) (-Considering a few hundreds dollars as cheap) Ozonesondes launched a bit less frequently are in the well above 1k$ range and reused if possible.
On another hand, being able to make most of them reusable would offer the technical possibility to fly higher grade radiosondes for the same overall cost. Meaning better or more data for the same price, meaning better forecasting for the same price.
There was a similar project on HAD (that got me interested in reading HAD regularly!) YEARS and YEARS ago where someone designed their own glider, used a balloon to get it real high, and they used autopilot to land the glider back at home base. Was a fascinating article. Some flames in the comments about how it would be impossible to build in the US due to FCC etc. Can’t find the article now, though… was before 2014, as I recall.
Could it be this article, Adam?
https://hackaday.com/2014/05/22/high-altitude-glider-will-be-dropped-from-a-balloon/
There are several such articles, some quite fascinating, with this search: https://hackaday.com/blog/?s=balloon+glider
Enjoy :)
You are completely right this is not a new idea. The implementation using a parafoil hasn’t really been done entirely successfully earlier tho. And you’ll love to hear that one of the main advantages of using a parafoil instead of a fixed-wing is that it’s much more FAA friendly: it’s just a parachute, “like on every other weather balloon” ;)
The second advantage is the system mass to available payload ratio. About 1kg of free payload here for 1.7kg total under the balloon, the third is you have less limit on the payload volume because there is less need to make it fit in an airframe.
A company called Atair Aerospace was doing it 15 years ago for the Navy. I used to machine parachute releases and winch covers for them. They’d drop Kawasaki KLR Enduro bikes that were converted to run on diesel, or palettes of four drums of fuel.
Yep! This video of their system is fantastic https://youtu.be/iFNFUqIRbkc. As you said I think the scale was a bit higher than what I’m trying to do, which bring a special pair of challenges on both sides, and at their time they used smaller aspect ratio wings (what they had access to) with limited performance. I’d be super interested to find out one day if they ended up doing high altitude flights (>10-15km starting altitude) and the challenges they faced.
If I’m not mistaken, deployment of a parafoil wing above 100kft has still never been demonstrated before (nor by me). This is what I wish to demonstrate on the next couple of flights.
I think this is one you are thinking about:
https://hackaday.com/2014/05/22/high-altitude-glider-will-be-dropped-from-a-balloon/
There was also a more recent one:
https://hackaday.com/2019/04/06/gliding-back-home-from-60000ft/
hackaday /2019/04/06/gliding-back-home-from-60000ft/
is it this one, video in the post is from 2014
Maybe this https://hackaday.com/2020/04/17/dropping-a-glider-from-18000-feet/
Sad that he has passed…
I don’t think he has :) Tarik is still doing super cool work https://youtu.be/F2HgZ9ZL4aE. We’ve been talking in the past about our different systems and I would love to fly both at the same time at some point as a challenge.
Excellent…!!!
I’m guessing I misread an article…
https://hackaday.com/2014/05/22/high-altitude-glider-will-be-dropped-from-a-balloon/ this matches both criteria. 2014 and first comment about FCC…
Search term simply was “glider” here on HAD :)
I think even earlier than that one, per this guy’s comment:
lwatcdr (@lwatcdr) says:
May 22, 2014 at 6:15 pm
Actually this was done and posted on Hackaday several years ago. Still a fun thing to do.
Still, a super-cool idea, either the paraglider approach, or the plane…
Maybe this: https://hackaday.com/2005/01/12/homebrew-autonomous-high-altitude-glider/ which links to this 2005 project Homepage: http://www.canuck-boffin.net/sonde/
Yup, I think this was the one :) Well done for finding it!
There’s another one here https://hackaday.com/2005/01/12/homebrew-autonomous-high-altitude-glider/ with the last comment pointing to the projects homepage from 2005 which ist still online…
I’ve been wanting to try sending something to space for a while now, but I live in Japan. Leaving the payload to the wind is the same as losing it on top of a building or throwing it kilometers out to sea. Basically it’s a non starter unless you have a very uncommon situation. A system such as this could be just the answer. I can find a clear 5m radius open space. Thanks for the article and the project!
Worth looking into the JPADS system the military tinkers with – drop a whole palletload of stuff into a 100 meter circle (more or less) from a cargo aircraft.
https://asc.army.mil/web/portfolio-item/cs-css-joint-precision-airdrop-system-jpads/
It’s worth noting that in order to get this kind of accuracy they drop a test unit first to calculate crosswinds and drift before letting the programmed payload go. Something to be aware of before you claim your gossamer project can land where you’d like on command – winds at altitude can be severe and overpower nearly any system.
Thanks for your comment. I don’t know If you spent some time working on such a system because you would quickly realize that the direct landing accuracy is the function of three things, the turn radius, the GPS accuracy at ground level, and the ratio between wind speed and airspeed at ground level during the final moments of the flight.
What R2Home can do that JPADS can’t is stay exactly in a 5-10m cylinder exactly above the landing point. See the trajectory at the end of the test flight video if you need to be convinced.
The wind speed at high altitudes is not as much of a problem as you think because it’s laminar and predictable. This means we can fly with the daily weather prediction(data from GFS, 0.5°×0.5°x30 altitude levels) and continuously adjust our trajectory such that after drifting with the wind we end up landing where we want. On higher altitude flights this navigation method will be used for most of the flight until the last hundreds of meters where the wind is less predictable and we switch back to normal CoG navigation where we need our forward airspeed (5-9m/s) to be faster than the wind speed.
Using this navigation you can reach any point withing radius R from the natural drift point. R = L/D * Intial altitude. So you can choose any point in a 60-90km radius.
So yes, we should’t fly on a day with more than 9 m/s of wind at ground level, but you still have to other 300 days.
This navigation with this accuracy on very high altitude flights (20+km) has been demonstrated on Matlab simulations whose parameters are based on the first high-altitude (3.5km) test flight you can see on the video. It will be fully demonstrated on the very next real flight.
Happy to continue talking about this with you if you have other questions.
Very nice project. I hope it can get smaller in the future. The source code really needs some comments ; as is, it’s very difficult to understand. The doc on HAD project is great.