Typically, when most of us need a motor, we jump online to order one from a catalogue. [Levi Janssen] recently had to build his own for a college project, however, and learned a lot along the way.
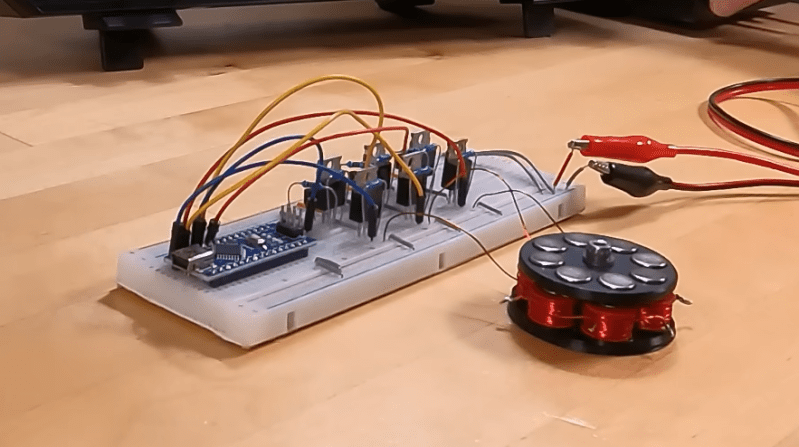
[Levi] whipped up his brushless DC motor design in OnShape. The motor has six coils in the stator, with the rotor carrying eight neodymium magnets. It’s an axial flux design, with the rotor’s magnets sitting above the coils. This makes construction very easy using 3D printed components. Axial flux motors also have benefits when it comes to power density and cooling, though optimization is outside the scope of [Levi]’s work here.
[Levi]’s video covers both the development of the motor itself as well as the drive circuit, too. The latter is of key value if you’re interested in the vagaries of driving these motors, which is far more complex than running a simple brushed motor. He even gets his motor up to 12,500 rpm with his homebrewed drive circuit.
Making your own motors can help you solve some difficult engineering challenges, like building motorized rollerblades. Alternatively, if winding coils sounds too slow and too hard, you can just use off-the-shelf gear and hack it to make it work. Here, we support both methods.














Excellent piece of work!!
Only thing on my mind while watching this was the hope you were wearing a face shield.
I don’t.
Darwin will smile soon.
Also motor driven f***t boots? Darwin also approves.
12k RPM is actually on low end of model airplane propeller speeds. Only the big ones spin that slow.
Well, years ago, actually make that decades, I was your age and was drilling a piece of steel using an old Chinese drill press. I had the odd habit of stuffing a telephone book into my shirt in case something went wrong. Lots of folks thought this funny. But when the drill stuck and shattered a small razor sharp shard of material got thrown and embedded itself in the phone book. Your glasses might help, but your eyes are fragile and, currently irreplaceable. I’ve been making things for fifty years – no injuries. My observation was not a put down, it was concern.
I’m not the subject of TFA.
I’m a Darwin fan.
I don’t hope he was wearing PPE.
If he was, good for him. If he wasn’t, self correcting problem.
I suggest he ‘fixture’ the motor down for testing by holding it between his thighs and testicles. That way he can recover all the broken bits of rotor out of the soft tissue. For science!
Have you read Darwin? Selection was the driving force behind his theory, but selection is neither progressive nor regressive. It’s based entirely on the environment. Selection of the fittest means only the fittest for a particular environment. What you are saying has little to do with Darwin but does represent the ideology of Herbert Spencer, a contemporary of Darwin. What you are asserting is the principle of “Social Darwinism” a political ideology that has little to do with Darwin’s original biological theory and eventually led to the eugenics program in the United States prior to World War Two. It was adopted by the Nazi’s and was the philosophic cornerstone to “the final solution”. So basically, you are using an argument from late 19th century junk science. You seem to lack empathy or concern for the well being of others. How can you know so much yet understand so little?
Darwin who?
Dave. He is referring indirectly to “the Darwin awards” which is actually published as a list of people who died dumb deaths, thereby removing themselves from the gene pool and increasing our fitness as a species as a whole.
Oh I know. But the Darwin Awards themselves carry on in the same eugenic tradition and as such are not in any way representative of Darwin’s thought. Darwin’s kinda an important guy, I just wish more people would actually read him. That and Karl Popper. Well anyway… :)
Start at a low duty cycle and increase it with speed, then decrease it as the speed catches up with the resonant value for maximum speed with optimised current draw.
Maybe I missed it, but did he drive it with a sine wave (PWM approximation)? That hacked arduino code didn’t look like it…
You can drive a pm motor with switching frequency. Speed setpoint in rpm divided by number of poles divided by 60 gives you switching frequency in hertz. Back emf is measured on the off cycle to determine rotor position and driven load. Pwm on the current waveform would give you a smoother wave, a pid running on the emf could very precisely position the rotor. Some conveyor systems use a similar setup because it tailors to varying loads very carefully. What he appears to have done is ride the fine line between single phasing the motor and giving it too much slip, ramping both switching frequency and current to speed/time. A slipping belt would destroy his motor driver, because current would not change directly or evenly proportional to rpm.
Hobby bearings at 15k RPM and a plastic frame, even with no mechanical load, friction is going to heat the bearings up after a minute or so and start to deform the mounts. You don’t have to worry about cooling down the mosfets for high switching frequency, the motor will go off axis permanently before that happens.
I was very upset to see no load/torque testing. A motor that spins nothing fast doesn’t exactly have a use case.
And even no balancing the rotor. Accident is predictable.
This is how we learn. *hopefully* this person will run it to failure and discover all these issues and redesign and test in iterative process.
I appreciate the start of the article stating what purpose of project is: to learn how to design and build stuff for a college project. rather than the much more typical HaD sell “look at this awesome thing!!” that is way stupid and just YouTube click bait. (?)fortunately(?) commenters here are usually quick to point out all that nonsense and call it like it is.
No, you can’t.
You can build a A 12,500 RPM brushless motor and use a 3D printer in the process.
Thank you. I’m so tired of this race to the bottom of dumb clickbait titles.