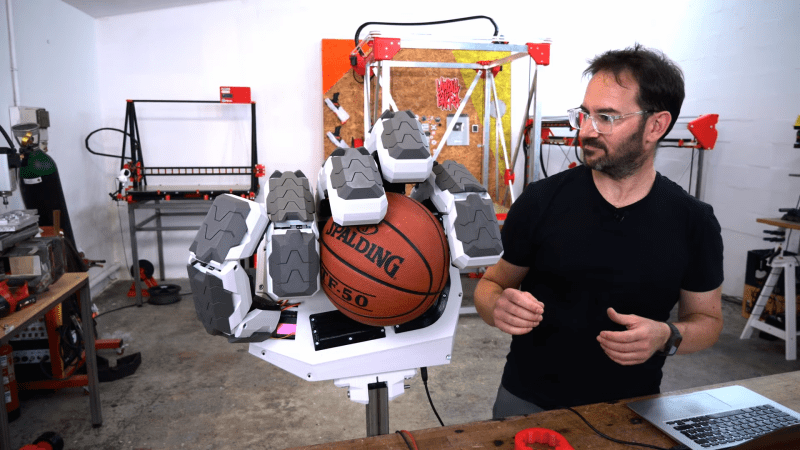
[Ivan Miranda] isn’t afraid to dream big, and hopes to soon build a 3D printed giant robot he can ride around on. As the first step towards that goal, he’s built a giant printed hand big enough to hold a basketball.
The hand has fingers with several jointed segments, inspired by those wooden hand models sold as home decor at IKEA. The fingers are controlled via a toothed belt system, with two beefy 11 kg servos responsible for flexing each individual finger joint. A third 25 kg servo flexes the finger as a whole. [Ivan] does a good job of hiding the mechanics and wiring inside the structure of the hand itself, making an attractive robot appendage.
As with many such projects, control is where things get actually difficult. It’s one thing to make a robot hand flex its fingers in and out, and another thing to make it move in a useful, coordinated fashion. Regardless, [Ivan] is able to have the hand grip various objects, in part due to the usefulness of the hand’s opposable thumb. Future plans involve adding positional feedback to improve the finesse of the control system.
Building a good robot hand is no mean feat, and it remains one of the challenges behind building capable humanoid robots. Video after the break.













Don’t these people have jobs?
Thank you for this helpful comment Andrew.
Don’t YouTubers, who’s job it is to produce video content, have jobs?
Do you see the video?
while this seems cute and kool and technically impressive….
I can’t help feeling the portents of doom that seem to be neatly attached to building something like optimus primes hand.
or something similar… nonetheless good work!
Off topic, but I find it weird that servos measure torque in kg (a unit of mass).
The “kg” reference is actually shorthand for kg-cm, a common SI measurement for RC servo torque. They are also specified in in-oz of torque.
Technically it’s Kg/cm but most of the marketing gumph seems to just forget about the /cm bit.
torque is force * distance; if we’re being technical, the units are kgf-cm (kilograms force * cm)
I was mostly disappointed he didn’t do it in his trademark red.
No, it’s kg * cm.
mass 7 distance, not mass*distance
Servos not big enough, it seems. Those fingers feel quite feeble in their grip strength. I think he needs way bigger motors to get both torque and adequate speed.
Thumb articulation is poorly designed,
Theres no hand splay
So basically its a nice kinetic sculpture.
TFA says ‘Building a good robot hand is no mean feat’ and doesn’t make the false claim that this is one. YouTube clickbait.
Dear HaD. We get it. Things can be 3D printed. How long are you going to be impressed by this?