When the term ‘robot’ gets tossed around, our minds usually race to the image of a humanoid machine. These robots are a fixture in pop culture, and often held up as some sort of ideal form.
Yet, one might ask, why the fixation? While we are naturally obsessed with recreating robots in our own image, are these bipedal machines the perfect solution we imagine them to be?
In Our Own Image
To start, let’s acknowledge the appeal behind humanoid robots. By aping the human form, they can theoretically more readily execute tasks in environments engineered for humans. Their two-legged form and dextrous hands make a wide variety of tasks easier, allowing them to walk up stairs, open doors, and perform a multitude of other tasks in a world built for homo sapiens. In domestic situations, in particular, this is key. No wheeled robotic vacuum cleaner has yet proven itself capable of surmounting these simple obstacles. But does this anthropomorphic approach to robotics make them an ideal solution?

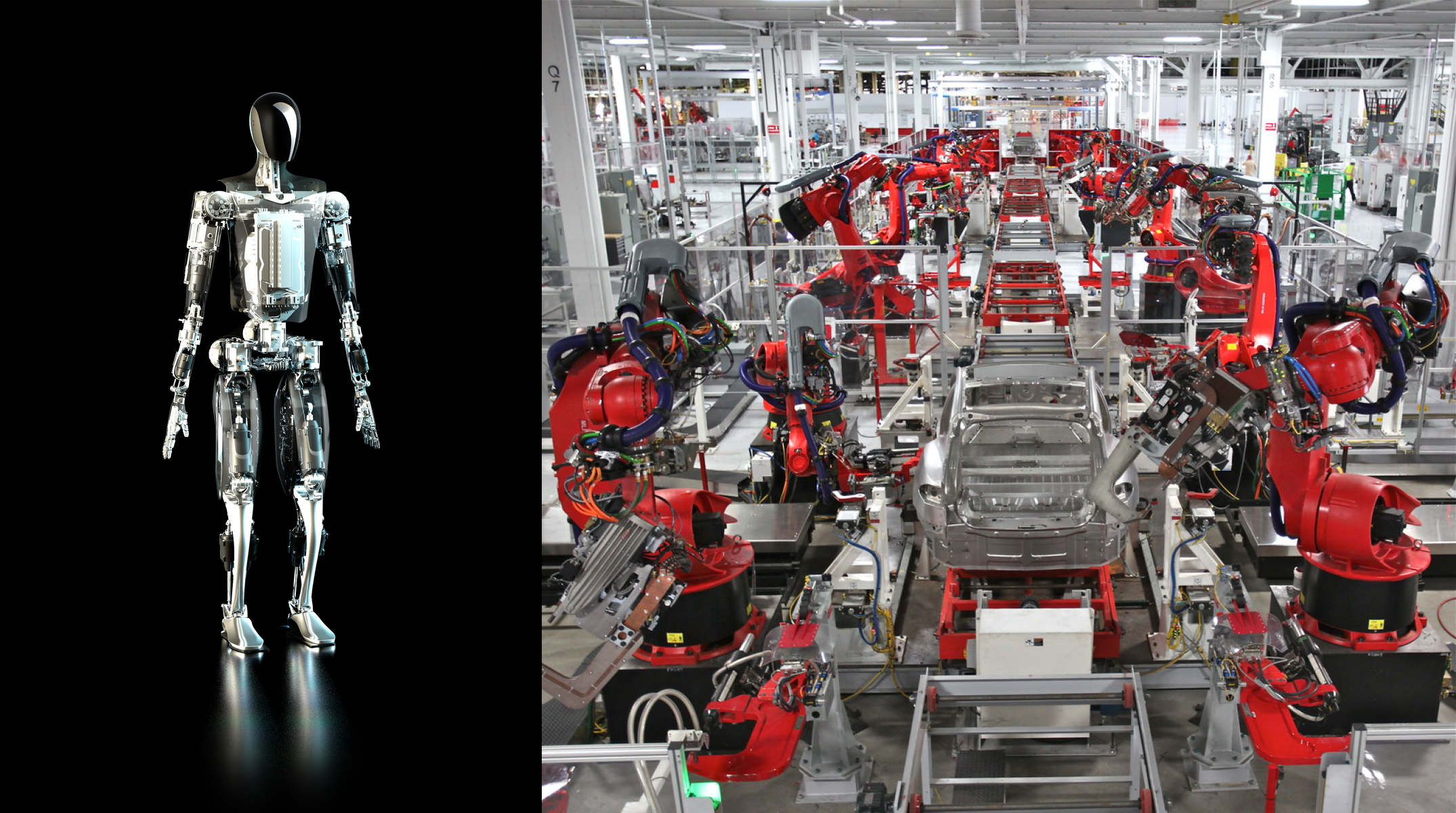
In reality, creating a robot that can accomplish specific tasks does not necessarily require it to be humanoid. Task-specific robots, designed with a focus on function rather than form, often outperform their humanoid counterparts. For example, consider industrial robots. These machines, devoid of any hint of human form, are far more efficient at assembly line tasks, loading and unloading heavy objects, and other factory work. Years of optimization has produced giant disembodied arms that are nonetheless capable of feats no human could ever match. Why build a complicated and awkward human-shaped robot to climb in and weld a car boy together, when a six-jointed machine can get the tool where it needs to go in a fraction of a second?
Similarly, the Roomba, a robot for cleaning floors, succeeds without arms or legs. It has a disk-like design that lets it navigate under furniture. Us humans, on the other hand, have to kneel down and futz around, jabbing the vacuum into the shadows. Drones, too, with their hovering ability, outperform humanoid robots in tasks like surveying land or delivering packages.
Is Engineering Better Than Evolution?
Humanoid robots don’t bring many strengths to the table. Instead, they offer a whole lot of compromises and weaknesses. The flexibility of the human form is that we can do a near-infinite range of tasks with some passable level of ability. For robots, this flexibility is often pointless. Even if they had a perfectly flexible human body to work with, they lack the intelligence and ability to carry out a wide variety of tasks. The human is a jack of all trades, while the robot is a master of one. They work best when told exactly how to do one thing, and then optimized as a whole to suit.
Even the basics of being vaguely human is hard. The challenge is in the complexity involved in mimicking human abilities. Walking on two legs, for example, is a marvel of balance and coordination that robots find extremely difficult to replicate. The energy expenditure required for a bipedal robot to maintain balance often reduces its operational time significantly.
Furthermore, replicating the intricacy of human hands and our fine motor skills is a formidable task. Most humanoid robots have rather crude grasping capabilities compared to a human, thus limiting their effectiveness.
Even our finest efforts are yet to produce a robot analogue of a human hand with comparable finesse, dexterity, and flexibility. To say nothing of the way we can coordinate our hands with our wrists, arms, and the rest of our body.
Then there are considerations of cost and fragility. Designing and manufacturing a humanoid robot is a complex, expensive task, often resulting in machines that are less durable and more prone to malfunctions.
So, where does this leave us with humanoid robots? They’re a bit of a craze lately, as it turns out. Tesla is pushing its Optimus robot, and using it as a sales gimmick in New York city. Startups like Sanctuary AI are touting their own Phoenix humanoid with what it touts as a “human-like general intelligence.” It’s got the ability to shake hands and give a very unconvincing thumbs-up. Intel, too, is investing big, with a $9 million sum to support the development of the Figure 01 robot.
It seems the appeal of humanoid robots lies more in our emotional response to them, rather than any promise of great functionality. They seem familiar and friendly, like the anthropomorphized animals we all love in cartoons. They promise a future where robot companions can seamlessly integrate into our human-centered world. But it’s essential to remember that, in many cases, the ideal robot may not look human at all. A Roomba is a hockey puck.
After all, the aim of robotics isn’t to create mechanical humans, but to build machines that can augment our capabilities, take on tasks that are dangerous or mundane for us, and overall, make our lives easier.
So what do you think? Are humanoid robots the future, or are we better off developing task-specific machines? Does the ‘human’ in humanoid limit our understanding and development of robotics? Do we just need smarter robot brains to make the humanoid format worthwhile? Share your thoughts in the comments below.














Just let me know when they build a working version of Milla Sofia …
Wow. Had to look “her” up.
#metoo
Don’t forget that one of the most beloved robots is R2-D2, which is basically a trash bin with legs :-D
+1
THANK YOU MAGIC TRASH CAN
(if you know you know)
Traveling in South Africa many years ago, a sign at a light showed they call traffic lights “Robots” which was appropriate.
The deal is very simple. In a non-free society, the servants don’t dream of being free – they dream of being the masters and having servants themselves. But that introduces a lot of problems, both moral and logistical. A robot servant (or sex slave) solves it easily, because it is not a person, so the morals don’t seem to apply, and the logistics just become a “technical problem” to be solving by adding more technology. Of course any deeper examination shows that the problems only get worse.
On the other hand, even if robots are not technically persons, their person-like appearance grants them a lot of leeway in our instinctive behavior – so by pretending to be a person and invoking all those moral qualms, the people controlling the artificial humans may get away with things like copyright violations (it’s creating original works based on what it learned, not just remixing existing works), fake information (I’m sorry, I was mistaken), unsolicited interactions, and free use of public infrastructure (sidewalks).
In the end, unless you are in the entertainment industry and need robots that look like humans because your story is about robots that look like humans, you are best to avoid making your products behave like persons. Make the tools look and work like tools. They will work better and get in your way less.
By the way, whoever thought that the best user interface for their product is a simulated torture interrogation session, like the ChatGPT has, has serious problems.
What will your job be comrade? I’m going to be a water carrier and poetry teacher.
Passing butter.
ChatGPT is a chat program – you are supposed to exchange messages with it. It is not a search engine or anything else. It chats. End of. Anything else it appears to do is a side effect of it being chatty.
By that definition, if you phone a friend, you’re talking to a analogue chat program, no matter who you call or what you’re talking about. ;)
Eh? Calling a really good car a car doesn’t make me a car when I carry things. Calling a chat bot a chat bot doesn’t make me a chat bot when I chat.
Do you call a friend to a ask your last search term with no results? Your analogy is off.
I like Deshipus thoughtful analysis. Trying to argue that you are simpleminded, and others should stop thinking just doesn’t work.
They managed to put some humanity in that robot in Interstellar, so you don’t really need a humanoid form.
The argument for it though is that we make everything for human use and human access and so for general use you need something that approaches human form. But it doesn’t have to go all the way.
Mind you, in term of access, we do have a lot of access for wheel chaired people, so maybe you don’t even need legs (up-vote from zuckerberg I\m sure ;)
side-note: my spellcheck suggest ‘rubbernecker’ is the correct spelling of Zuckerberg. Robot eh, they be nuts.
I think the biggest case for humanoid robots is that they have operate in a world designed around humans. Imagine a robot that we want to send in to hazardous situations and be able to operate valves and such in a chemical plant or the engine room of a ship. It will need to be able fit through areas less than a meter wide, climb stairs and ladders, and operate controls sized for human hands. Now there are many ways to design such a robot, but humanoid is good starting point
I tend to agree. Make that a ‘generic’ do all robot. Specific task robots do not need that same form factor. A Roomba vacuum for example, or welding a specific part on a car, or … Form to Function applies there.
A 4 legged robot would work in a lot of spaces as well. Instead of a upper body, it could have a tool arm, like Spot from Boston Dynamics.
Sure, but then you find that to grab things from high storage and operate above counters you need a high torso with two long limbs (for balance), and your optical sensors just above… And why have four legs when 2 are enough? (and probably better in tight spaces and stairs).
Small central body no larger than a human torso so it can fit down passageways made for humans. Smaller is even better in case there is rubble partially blocking the path.
Lots of prehensile limbs for climbing, walking across uneven terrain and for gripping tools intended for human use such as the valves you mentioned. No need to be limited to 2 arms, 2 legs. How many before they get too expensive, get in one another’s way, etc…?
Sensors (cameras, sonar, microphones, etc…) can go in the central body “torso” or in the arms of the prehensile limbs. No need for a separate head that might get caught somewhere or hit by something. Also, might as well have sensors in all directions, no need to be blind in back.
Optionally some of those limbs could have wheels on the end allowing for faster, smoother movement when terrain allows.
Yah, I don’t see why starting with the human form is the way to go in your scenarios.
Of course such limbs are going to be hard to build but not impossible and BTW, a humanoid robot is a huge challenge too.
As the inventor of the Sandwich Artist Robot, I agree wholeheartedly.
The reason we have so many humanoid bots is because none of these robotics companies like Tesla are actually in the robotics business. They’re a sales pitch to collect investments for a product that will never reach market.
As a boy I had my heart broken by many companies, most notably in my mind, Honda because they showed me a robot, promised a release date and they were such a big car company I thought they would finally accomplish it.
I was in elementary school, now I’m middle-aged.
I let go of the dream humanoid robots.
When I finally got the opportunity to start my own robotics company, I knew the number one most important thing was traction.
It had to be profitable from robot sale #1 or it would die like every robot I saw promise to me in my childhood.
It doesn’t look like a robot, but it’s real.
I have no investors or partners so no one can pressure me to go humanoid and fail like all the others.
When I see a humanoid but I feel bad for the engineer. I know he’ll do anything to make this real. And I know he’s going to fail, no matter how big his effort.
As the owner of several Roombas, I can assure you that they’re far from an ideal form for their intended task. One sock on the ground derails everything. And the fact that I have to even have multiple ones illustrates the biggest issue – they can’t go up and down stairs.
There’s a place for robots engineered to a specific task, but they have to live in a very controlled world, and that’s usually a world that isn’t friendly to humans. Assembly line robots aren’t usually interspersed among human workers, they’re in an area where humans can’t do much but walk by and look at them. Warehouses that use robots frequently have to be redesigned around the functions of the robots, and that usually means getting the humans out of the way.
If we want robots to live and work where we do and perform our daily tasks, we can’t redesign the world for them. They’re going to to need to be able to navigate it at least as well as we do, and a human form would check those boxes. Now obviously, it’s challenging for the tech, but that won’t always be the case. At one point, even building a hockey puck that could wander around and get stuck on a sock was an impossibility.
So we need to modify the pizza elevator to move roombii between levels.
I want to see a Roomba painted bright orange with a 01 on it, jumping off the top of a flight of stairs. Yeeeeee-hawwww!
Copying the human hand, to stick robotic ones on the end of stationary arms, or on arms mounted on wheeled, tracked or SPOT like quadruped or hexapod platforms, makes a lot more sense than copying bipedal overall body forms. The human hand is very capable, and this is immediately applicable to virtual all applications where a current gripper of some form (almost always inferior to the human hand not just in general but even for the specific task the gripper is optimised for) is needed. With robotic actuators such a copied hand has the dexterity of the human hand, but stronger, faster, and capable of greater precision where the hand’s morphology alone isn’t enough for tasks. Bipedal motion on the other hand is easily outclassed in virtually all environments by either wheeled, tracked or multi-legged, or some combination thereof (powered wheels on leg ends with an extra ankle joint that can swap between wheels vs wide area pads for clambering and low ground pressure scenarios).
I agree that building a single-purpose robot in the human form is silly. Well.. for most purposes.. not going any farther down that one road…
Anyway, that doesn’t mean the desire to make them at all is also silly. First, clearly it’s in our nature to want to build that. And in most of the world we are beyond the point of struggling to provide basic needs. So why not indulge?
Then there is the very different but often connected desire to make an AI in the form of a human-like mind.
Perhaps we will never make it out into the universe. The worlds nearest to our own seem pretty grim and space is so vast. But a people whose bodies are technology, who can live, repair and reproduce off of the resources found in rock… who don’t need our perfect range of temperature, air pressure and oxygen. In the far future humanity’s creations might be it’s children.
Of course such an AI need not be confined to the human form. But what parent doesn’t want offspring that resemble themselves?
They’ll eventually build the sexbots and give them away for free. Airdrop them into war zones. Anything to push down the birthrate.
More comments on the subject:
https://hackaday.com/2022/10/17/in-our-own-image-do-we-need-humanoid-robots/
I think the main reason robots in SF usually look humanoid are:
1. For movies or TV, it’s easier to put an actor in a robot costume than to make it look like real world machinery.
2. For written media, writers are more interested in using robots as metaphor than setting up realistic automation.
Don’t you think humans may ‘relate’ better to the human form than to say R2-D2 vs. C-3PO? What better may to interact with humans than to act like a human in format and action?
Come to think of it, I don’t think I relate all that much to humans actually, probably not more than a few other shapes and designs.
I don’t go around thinking ‘oh cool, this creatures has a similar design he/she is probably great!’
Uncanny valley.
If you try to fake a human form, you better not miss by just a little.
See also: Cat Lady, Kim Cardassian, M Jackson etc etc etc
Early in my career I had the opportunity to work with the ASEA now ABB robotic arms. One of the engineers brought his son in to see the robot he was working on. He was mightily disappointed when he saw the arm and asked where the real robot was!
The multi-armed Hindu gods model could be useful. Drill. Driver. Solder. Soldering iron. Hammer. Light. Vice-Grip. Screw-setter. I remember seeing the guy in some ad. Popular Mechanics or such.
I’m yet to be convinced that all these walking robots are doing anything that couldn’t be done more efficiently by something with wheels.
Going up and down stairs.
Climb stairs? Ladders?
Granted those aren’t solved problems for legged robots.
With the number of humans killed on ladders it’s not really a solved problem. I digress.
Physical Donkey Kong Mario robot contest?
Autonomously walk/run, climb ladders and jump over balls.
10 years later, no entrant ever completes level 1. First ‘winner’ makes it to base of first ladder before balls get there.
For strictly utilitarian purposes, humanoid is probably not practical but it does have a certain “neat” factor to it
If you want to explore reaction to humanoid robots read Asimov’s ‘Caves of Steel’ its very prescient.
Optimus is designed to work hand in hand with humans and use their tools.
The reason robots will be human shaped is so that they can easily be used to replace human jobs.
I think that it’s good practice, but maybe rushing things. Just like the rockets that got humans to the moon, they probably aren’t going to be the same rockets that get humans to mars or out of the solar system. It may be that after a while, if humans haven’t destroyed themselves someone will find out that the way we were trying to build robots was impractical. Perhaps that the whole machine paradigm was impractical and instead move to a more biological wetware approach. Que sera sera what will be will be.
Robots do not need to be humanoid to replace human jobs. An electric rice cooker doesn’t have to look like a maid to cook rice perfectly every single time. (or laundry machine, or you name it.) On top of that, not every effector should have the complexity of human hand to be a capable robot.
The only reason I can see us needing a humanoid robot is – just that. We need a humanoid robot. That’s about all the reason I see. Consider a lone old man that needs a caring hand nearby. Hiring someone will come costly (1) and even that person won’t be available 24/7 (2). And this care taking robot would be well suited if it looks like a human, than a machine. This is about the only scenario where humanoid robot is preferable. Not because of the functionality.